Ở bài này blogdankythuat.com sẽ giúp các bạn cách cài đặt thanh trang thái trên màn hình teach mode trong lập trình robot Nachi.
Cài đặt thanh trạng thái
Trước khi ghi lệnh di chuyển trong chương trình, chúng ta phải cài đặt thanh trạng thái bằng cách thực hiện theo các thao tác dưới đây.
Chúng ta cũng có thể sửa đổi các tham số bằng cách sử dụng chức năng trình chỉnh sửa màn hình của máy tính.
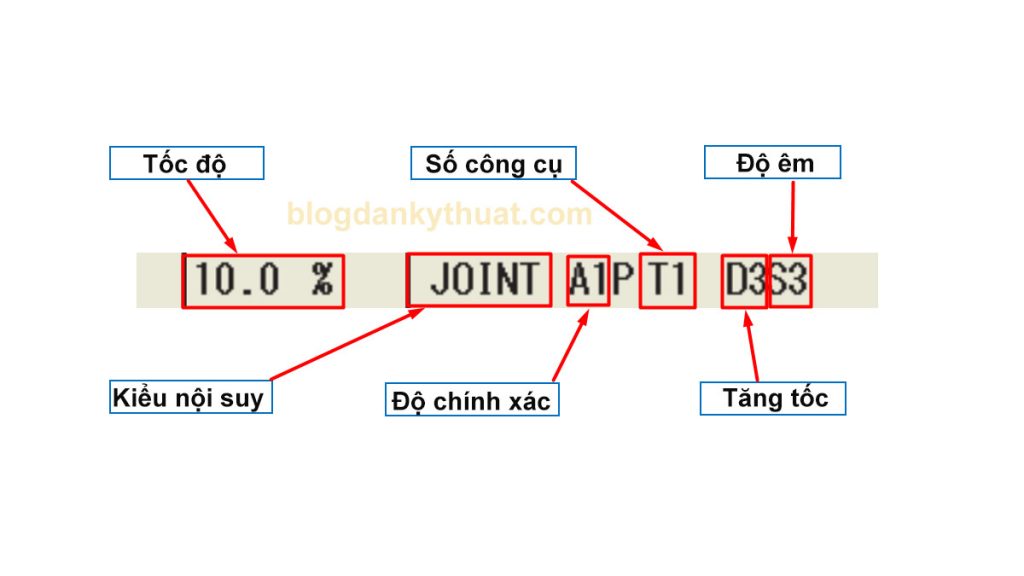
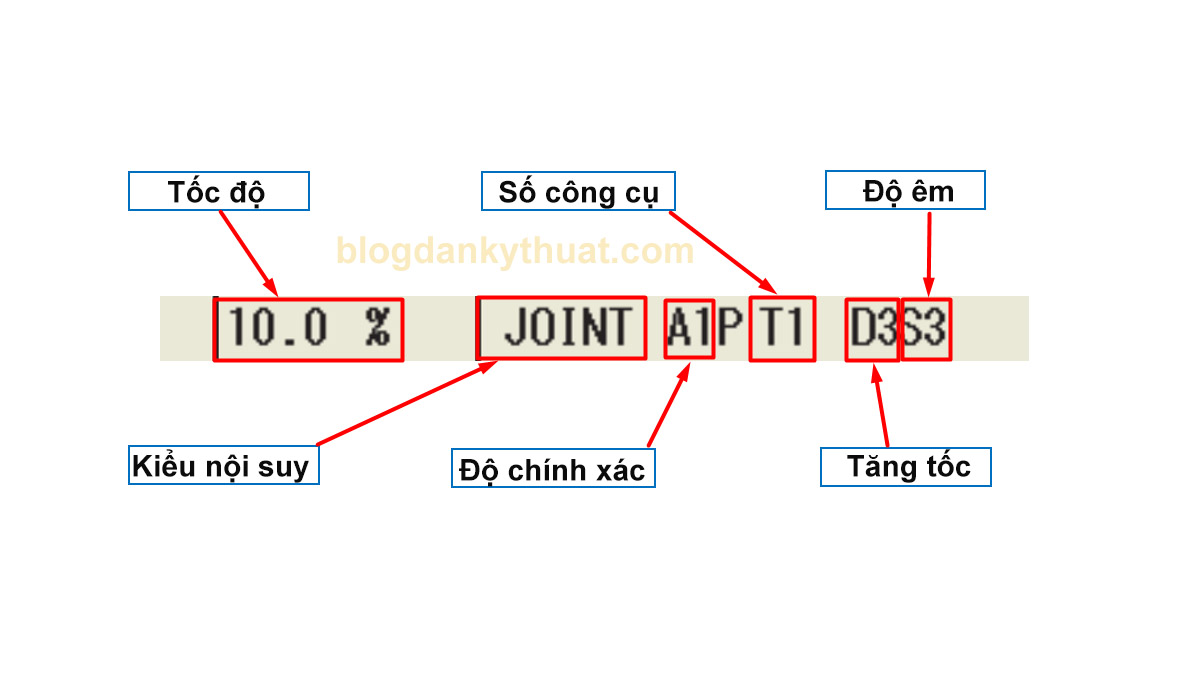
1. Tốc độ
Chọn tốc độ ghi bằng phím [CHECK SPEED / TEACH SPEED]
Tốc độ ghi lại thay đổi đồng thời với tốc độ thủ công khi ấn nút [Manual speed]
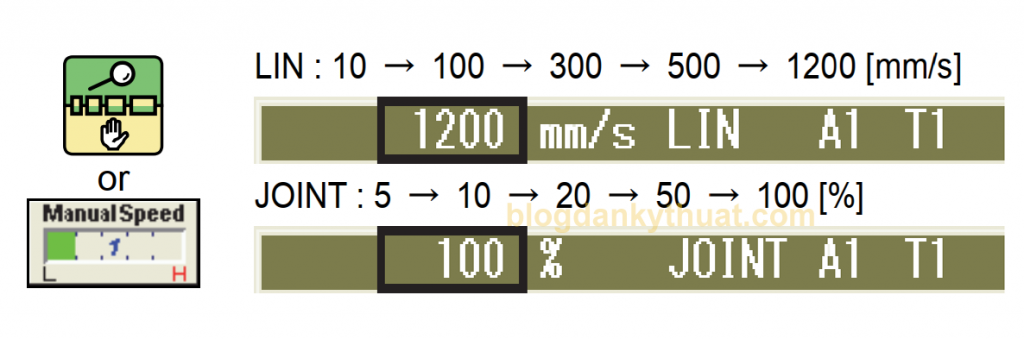
Mỗi lần nhấn phím này, tốc độ cho lệnh di chuyển sẽ thay đổi.
2. Kiểu nội suy
Chọn loại nội suy bằng cách ấn đồng thời phím [Enable] + [Coord].
Tại thời điểm này, tốc độ thay đổi IOINT -> % ,LIN -> mm/giây.

3. Độ chính xác
Thay đổi độ chính xác từ A1 đến A8 bằng phím [ACC]
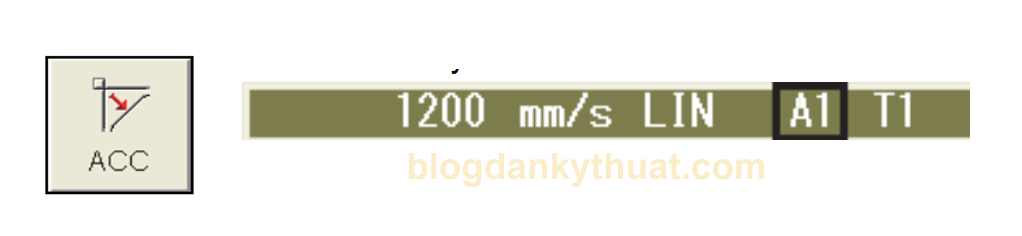
Mức độ chính xác cho lệnh di chuyển được xác định
4. Tiếp tục / tạm dừng (P)
Đặt tiếp tục (không có P) tạm dừng hoặc tạm dừng (với P) bằng cách nhấn
[Enable] + <Continue / Pause>.
5. Số công cụ
Ấn nút Tool để mở màn hình . Sau đó nhập số công cụ mới và ấn [Enter]

6. Tăng tốc
Thay đổi tăng tốc từ D0 đến D3 bằng cách nhấn phím [Enable] + <Accel>

7. Độ êm
Thay đổi độ êm từ S0 đến S3 bằng cách nhấn phím <Smooth>
Chú ý : Liên quan đến các tham số cho lệnh di chuyển
- Các tham số của lệnh di chuyển được xác định bởi thanh trạng thái có thể được sửa đổi sau khi ghi lệnh di chuyển. Do đó, cho đến khi bạn quen với hoạt động của robot, chỉ nên tập trung vào cách ghi lại vị trí của robot. Và sau đó sửa đổi các tham số tương ứng sau đó bằng trình chỉnh sửa màn hình màn”.
>>> Xem thêm lập trình robot ABB, lập trình PLC