Ở bài viết này chúng ta cùng nhau tìm hiểu Teaching robot trong lập trình robot Nachi.
Định nghĩa cụ thể về Position
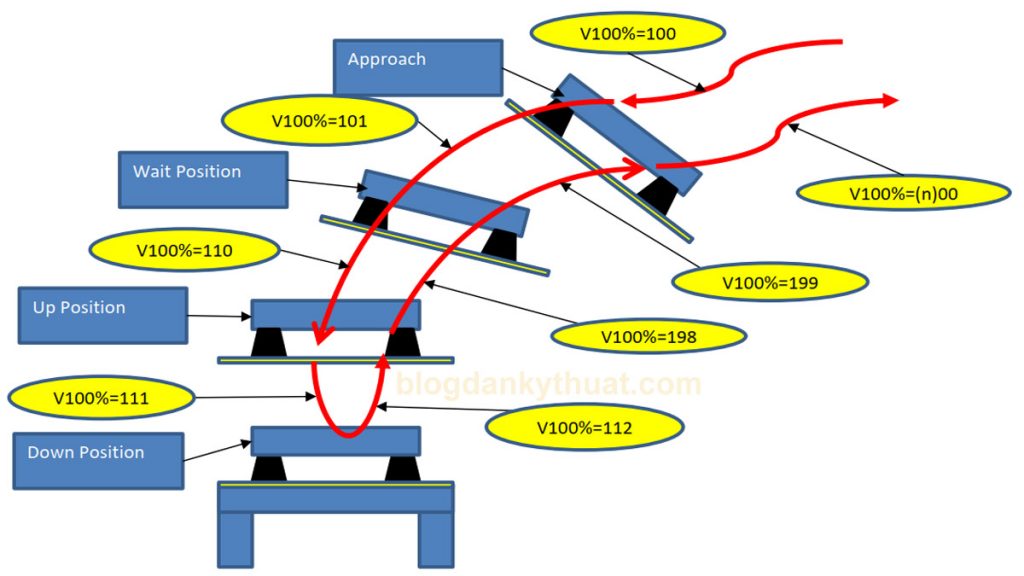
1.Approach Position
Mỗi Process tồn tại một Position.
Safety Position là vùng an toàn để di chuyển qua lại giữa các process.
Khi teaching Approach Position thì di chuyển giữa các app position của các process phải không gây ra va chạm.
Số pose thì chia theo số của process (n)00
Khi Origin return thì stepmemory (V100%) sử dụng ở start approach định nghĩa là (n)00, End Approach là (n)99.
Ví dụ: số App Pose của P1 là 100, trường hợp end Approach course thì stepmemory (V100%) là giá trị số nguyên 199
2. Wait Position
Vị trí trước khi tiến vào Process
Giả thuyết Teaching tại nơi không có vật cản process đó.
Ngoài ra khi di chuyển giữa các process thì khi di chuyển Wait to Wait không được có vật cản, tuy nhiên trong trường hợp có vật cản thì cần di chuyển đi qua Approach.
Sau khi kết thúc Process thì có thể di chuyển đến vị trí chờ cơ bản, ngoài ra cũng là vị trí báo lỗi.
Số pose thì phân chia theo số Process (n)01
Phân chia Stepmemory(V100%) được dùng cho origin return thì định nghĩa Start Approach là (n)01,End Approach là (n)98
Ví dụ: Pose Wait của P1 là 101, và lưu giá trị Integer vào stepmemory (V100%) nhập giá trị số nguyên 101.
3. Up Position
Tùy theo Tool và Process vị trí bắt đầu về process Get hoặc Put mà có thể tồn tại nhiều số Up.
Khi phát sinh Get&Put Error xử lý Retry. Retry lại sau khi trở về Up position
Số Pose được phân biệt bằng số Process(n) 10. Trường hợp nếu cần nhiều Up Position vì có nhiều tool thì viết (n)20, (n)30.
Stepmemory (V100%) được áp dụng trên Origin Return phân biệt bằng số Process (n)10 hoặc (n)20.
Ví dụ: Số Up pose tool1 của P1 là 110, số Up pose tool2 là 120.
Trong Step Memory trường hợp tool1 nhập giá trị hằng số 110. Tool2 nhập giá trị hằng số 120.
4. Down Position
Có thể tồn tại nhiều loại Down tùy theo vị trí Get và Put Process, công đoạn, tool…
Pose được phân chia thành Process (n)11. Trong trường hợp cần nhiều Down Posedo cấu tạo da HAND thì cần viết thành (n)21, (n)31.
Stepmemory (V100%) được sử dụng trong Origin Return được phân chia thành Pose(n)11 hoặc (n)21.
Ví dụ: Số Pose Down của tool 1 của P1 là 111. Số Pose Down của tool 2 là 121. Nếu là tool 1 thì nhập giá trị Integer 111, Nếu là tool 2 thì nhập 121 vào Stepmemory (V100%).
Quan trọng:
Về mối liên quan Course Program
Bắt đầu từ Start wait và kết thúc ở End wait, có thể acc ess Start app->Start wait và End wait->End app
>>> Xem thêm lập trình robot ABB, lập trình PLC