
Vùng giao thoa robot nachi là gì?
Hiện nay với thời kỳ phát triển mạnh mẽ của tự động hóa vào các doanh nghiệp sản xuất thì chúng ta không thể không nhắc đến việc áp dụng robot như: robot nachi, robot abb, scada,… trong các nhà máy xí nghiệp. Để đáp ứng được nhu cầu đó cần rất nhiều những kỹ sư am hiểu về robot, kỹ thuật. Vậy bạn còn chần chừ gì nữa khi khổng bổ sung cho mình kiến thức, nền tảng đó để bắt kịp với xu thế và nhu cầu của thi trường lao động.

Ở bài viết này mình sẽ giới thiệu cho các bạn về cách cài đặt vùng giao thoa robot nachi. Vậy vùng giao thoa của robot là gì?
Vùng giao thoa robot nachi là một vùng mà do người lập trình tạo ra để khi vận hành robot hoạt động trong phạm vi cho phép. Với mỗi vùng giao thoa chúng ta có thể cài đặt các tín hiệu khác nhau để nhận biết
Ý nghĩa của tín hiệu vùng giao thoa là một tín hiệu chỉ ra rằng robot của một thiết bị điều khiển khác hoặc phần chuyển động ở phía thiết bị đã thâm nhập vào vùng giao thoa。
Hoạt động khi ON
Robot của thiết bị điều khiển khác hoặc bộ phận chuyển động ở phía cơ sở liên quan đến nó đang hoạt động bên ngoài vùng giao thoa và tiếp tục công việc của robot
Hoạt động khi OFF
Xem xét robot của thiết bị điều khiển khác hoạt động trong khu vực nhiễu thì robot sẽ chờ
Cài đặt vùng giao thoa robot nachi
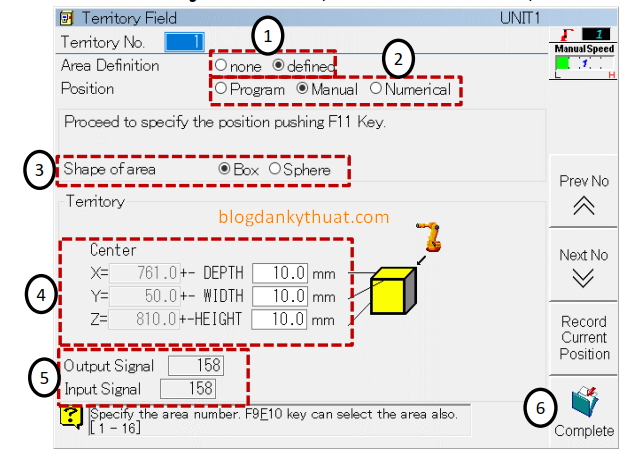
- Chọn Constant setting >>> 9. Territory Definition >>> 2.Territory Field
- Chỉnh các thông số như hình trên :
- Cài đặt khu vực để sử dụng
- Chọn các tham số chương trình
- Chọn hình chữ nhật, hình hộp hoặc hình cầu
- Đặt các giá trị tọa độ và phạm vi của khu vực
- Thiết lập các tín hiệu đầu vào và đầu ra cho robot
- Sau khi thiết lập các thông số trên xong bạn chọn “Complete” để hoàn thành việc cài đặt cho vùng giao thoa của robot.