Ở bài viết này chúng ta cùng nhau tìm hiểu một số lệnh nâng cao hay dùng trong lập trình robot nachi.
Lệnh trong lập trình robot nachi
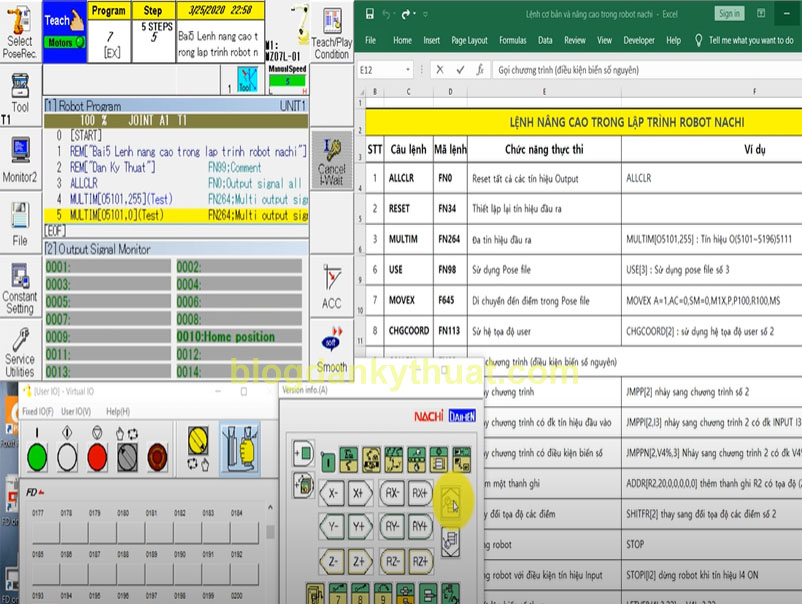
1. ALLCRL – Mã lệnh FN0: Reset tất cả các tín hiệu Output
- Ví dụ: ALLCLR
2. RESET – Mã lệnh FN34: Thiết lập lại tín hiệu đầu ra
3. MULTIM – Mã lệnh FN246: Đa tín hiệu đầu ra.
- Ví dụ: MULTIM[O5101,255] : Tín hiệu O(5101~5196)5111
4. USE – Mã lệnh FN98: Sử dụng Pose file.
- Ví dụ: USE[3] : Sử dụng pose file số 3
5. MOVEX – Mã lệnh F645: Di chuyển đến điểm trong Pose file.
- Ví dụ: MOVEX A=1,AC=0,SM=0,M1X,P,P100,R100,MS
6. CHGCOORD – Mã lệnh FN113: Sử dụng hệ tọa độ user.
- Ví dụ: CHGCOORD[2] : sử dụng hệ tọa độ user số 2
>>> Xem thêm lệnh trong lập trình PLC, robot ABB
7. CALLPN – Mã lệnh FN82: Gọi chương trình (điều kiện biến số nguyên).
- Ví dụ: CALLPN[5,V5%,3] Gọi chương trình số 5 với điều kiện biến nguyên V5%=3
8. JMPP – Mã lệnh FN83: Nhảy chương trình.
- Ví dụ: JMPP[2] nhảy sang chương trình số 2
9. JMPPI – Mã lệnh FN84: Nhảy chương trình có điều kiện tín hiệu đầu vào
- Ví dụ: JMPPI[2,I3] nhảy sang chương trình 2 có đk INPUT I3 ON
10. JMPPN -Mã lệnh FN85: Nhảy chương trình có điều kiện biến số.
- Ví dụ: JMPPN[2,V4%,3] Nhảy sang chương trình 2 có đk V4%=3
11. ADDR – Mã lệnh FN69: Thêm một thanh ghi.
- Ví dụ: ADDR[R2,20,0,0,0,0,0] thêm thanh ghi R2 có tọa độ (20, 0, 0, 0, 0, 0)
12. SHITFR – Mã lệnh FN52: Thay đổi tọa độ các điểm.
- Ví dụ: SHITFR[2] thay sang đổi tọa độ các điểm số 2
13. STOP – Mã lệnh FN41: Dừng robot.
- Ví dụ: STOP
14. STOPI – Mã lệnh FN42: Dừng robot với điều kiện tín hiệu Input.
- Ví dụ: STOPI[I2] dừng robot khi tín hiệu I4 ON
15. LETVF – Mã lệnh FN76: Thiết lập biến số thực.
- Ví dụ: LETVF[V4!,3.22] : V4!=3.22
16. LETVS – Mã lệnh FN77: Thiết lập biến số các chuỗi.
- Ví dụ: LETVS[V5$,”DANKYTHUAT”] Gán V5$=”DANKYTHUAT”
>>> Xem thêm video hướng dẫn Một số lệnh nâng cao trong lập trình robot Nachi Bài 5 – Robot nachi level 2