Hệ tọa độ user là gì?
Hệ tọa độ user là hệ tọa độ do người dùng tạo ra.
Mục đích để robot có thể thao tác, vận hành trên một mặt phẳng mà người dùng cần làm việc…
Các bước tạo hệ tọa độ user
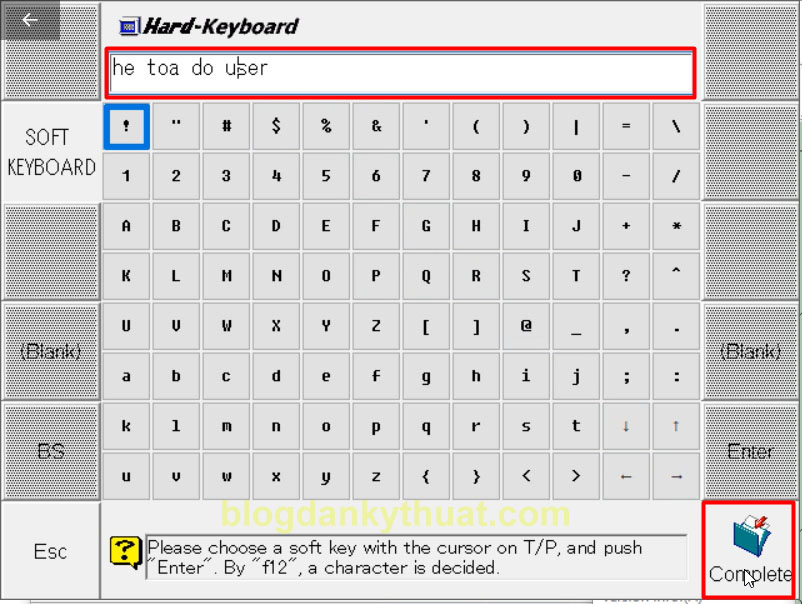
Bước 1: Tạo chương trình vẽ và lưu ba điểm OXY trên một mặt phẳng
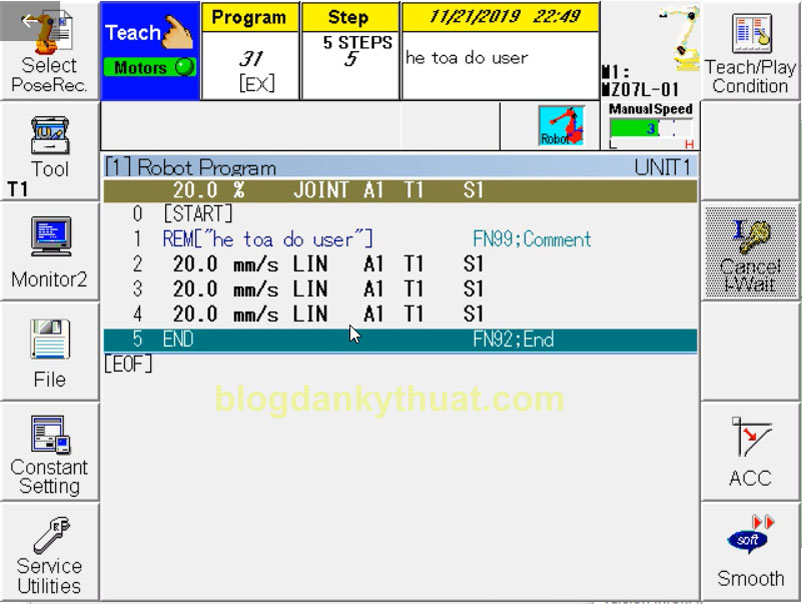
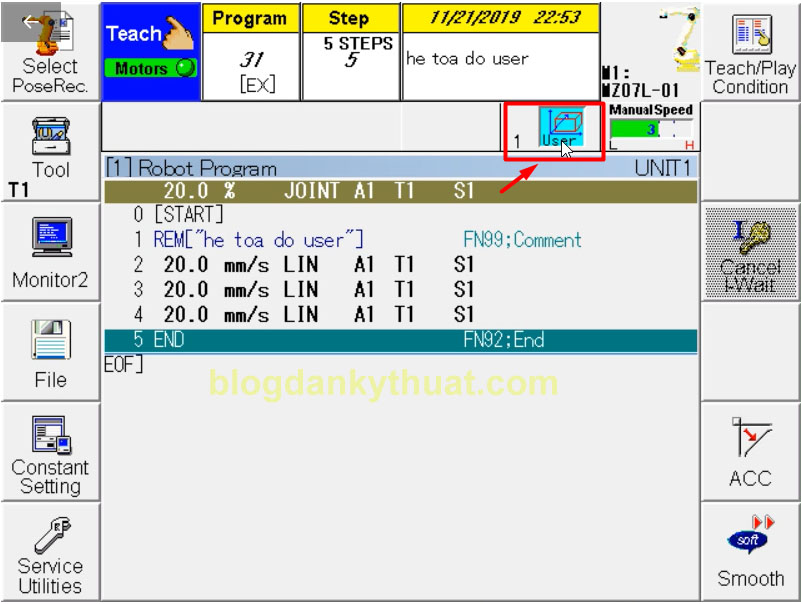
Bạn tạo chương trình 31 click FN99 và đặt tên chương trình là “he toa do user” rồi click Complete.
Điều khiển robot di chuyển và tạo ba điểm O, X ,Y
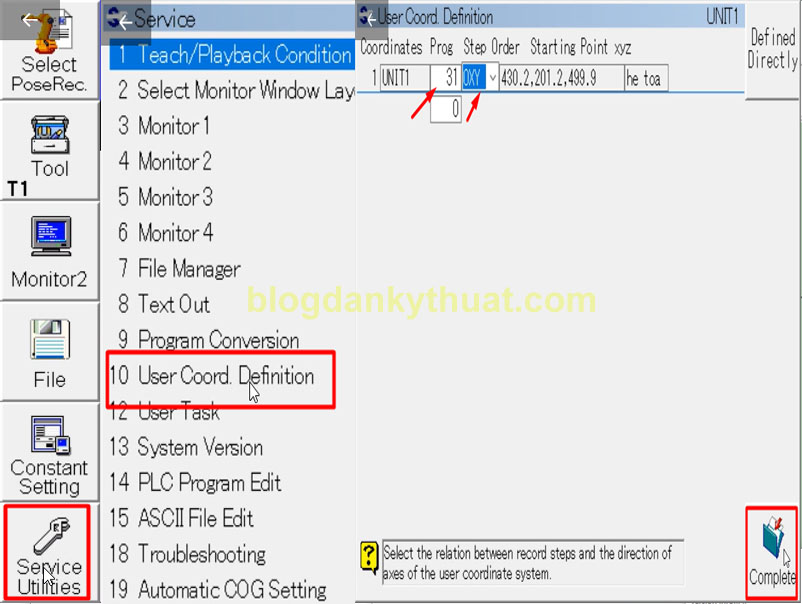
Bước 2: Thiết lập, đăng ký hệ tọa độ user
Bạn click Service Utilities -> chọn “10 User Coord Definition” -> trong phần UNIT1 bạn chọn tên chương trình 31 click Enter, chọn hệ tọa độ OXY và click Complete. Click R để thoát.
>>> Xem thêm lập trình robot ABB, lập trình PLC.
Bước 3: Gọi hệ tọa độ user ra
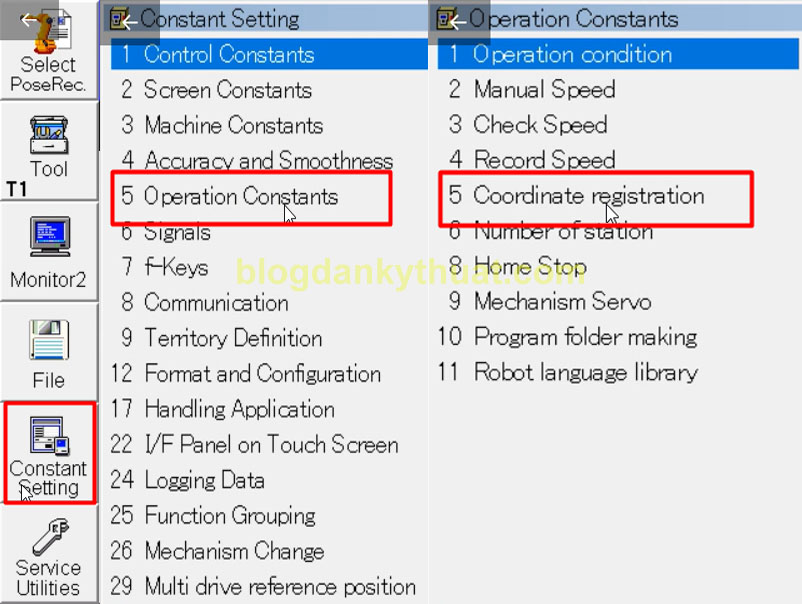
Bạn click vào Constant Setting -> chọn “5 Operation Constants” -> click chọn “5 Coordinate registration“.
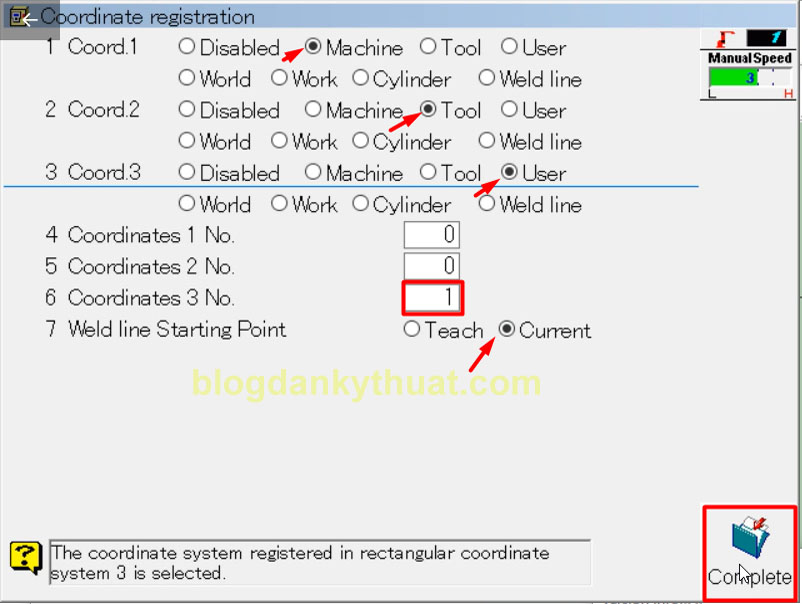
Trong cửa sổ Coordinate registration. Coord.1 click Machine. Coord.2 click Tool. Coord.3 click User. Coordinate 3 No nhập “1” click Enter. Mục 7 Weld line Starting Point chọn Current -> click Complete.
Bạn quay ra chương trình và đổi hệ tọa độ robot thành hệ tọa độ user
Trên đây là toàn bộ các bước tạo một hệ tọa độ user trong lập trình robot nachi.
Chúc các bạn thành công!
Xem video hướng dẫn chi tiết bên dưới.