Chương trình Pose file là gì? Cách tạo, thêm, sửa, xóa pose file trong lập trình robot nachi như thế nào? Ở bài viết này blogdankythuat.com sẽ giúp các bạn tìm hiểu rõ hơn nha.
Chương trình Pose file là gì?
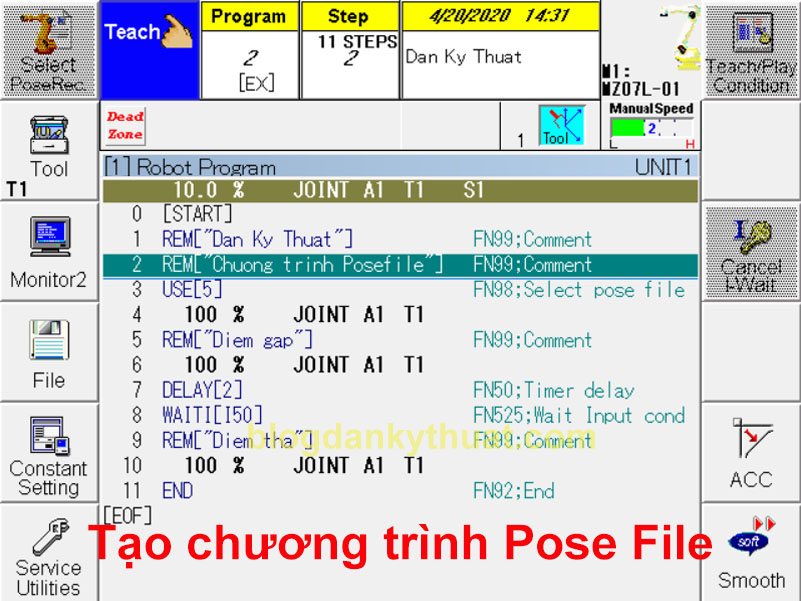
Chương trình Pose file là một chương trình lưu tọa độ các điểm mà chúng ta lập trình cho robot thực thi ở trên những vị trí khác nhau.
Các bước tạo, thêm, sửa, xóa chương trình Pose File
>>> Xem thêm lập trình PLC
Tạo chương trình Pose File
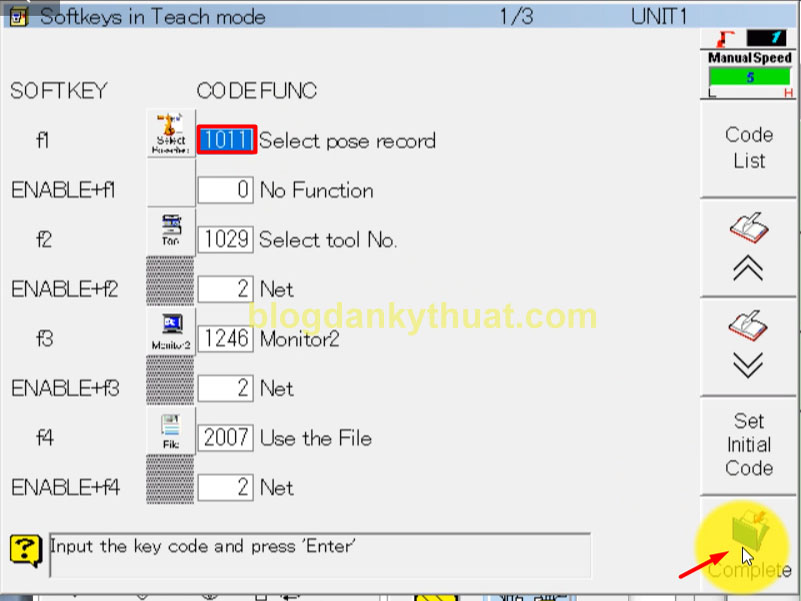
Bước 1: Tạo phím f-Keys
Bạn vào Màn hình teach Mode click phần Constant setting -> click chọn mục 7 F-Keys-> click chọn muc 2 Softkeys in Teach Mode

Ở phần F1 bạn nhập mã code là 1011 rồi click Complete phím F keys và chương trình Pose file đã hiện ra.
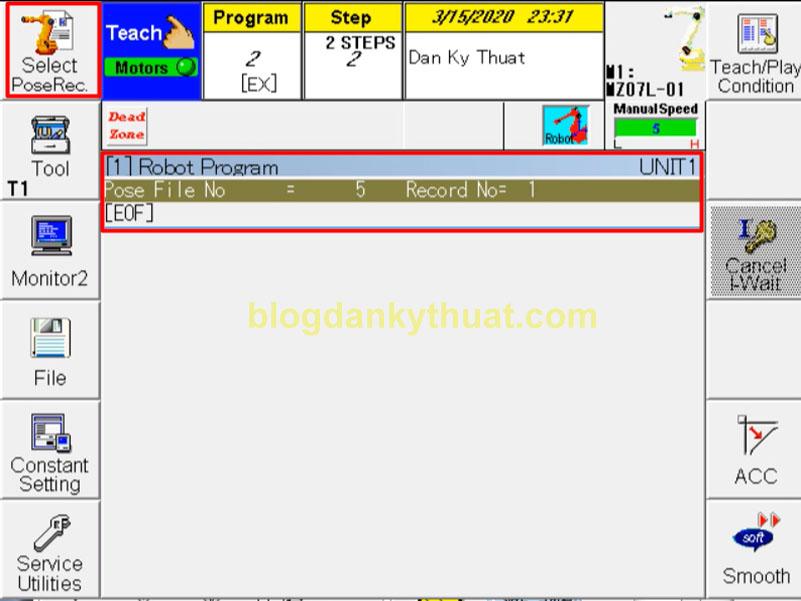
Bước 2: Tạo Pose Flie
Bạn click vào Select PoseRec màn hình chương trình pose sẽ hiện ra . Ví dụ ở đây ta có chương trình số 5
Trong chương trình số 5 ta cần tạo 3 điểm: Điểm home, điểm gắp, điểm thả

- Tạo điểm 1 là điểm Home (robot): Trong cửa sổ TP ta ấn recode để lưu điểm home.
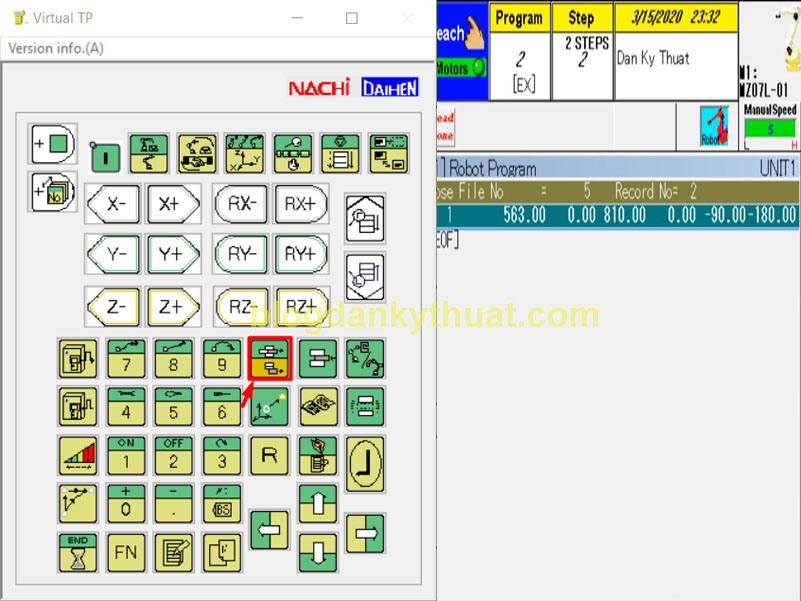
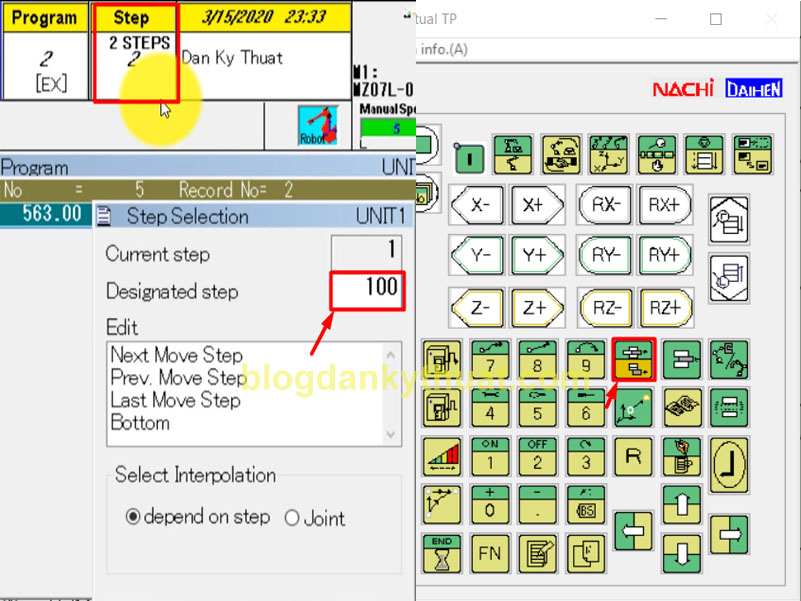
- Tạo điểm 100 là điểm gắp: Di chuyển điểm home đến điểm gắp 100 . Ở cửa sổ FD ta click vào Step trong phần Designates Step ta nhập 100 click Enter . Tiếp đó trong cửa sổ TP click chọn recode .
- Tạo điểm 200 là điểm thả: Di chuyển điểm home đến điểm thả 200 . Ở cửa sổ FD ta click vào Step trong phần Designates Step ta nhập 200 ấn Enter . Tiếp đó trong cửa sổ TP click chọn Recode .

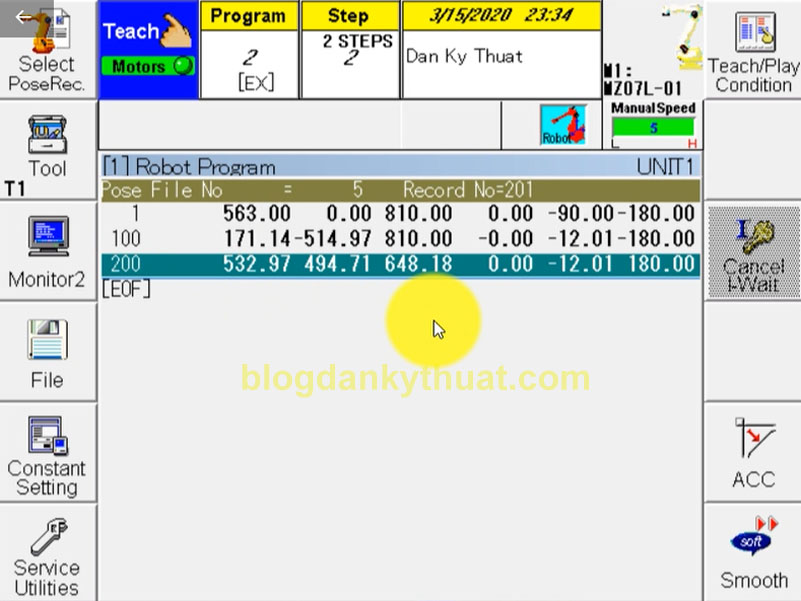
Dưới đây là 3 điểm mà 1, 100, 200 mà ta vừa tạo ra.
Thêm Pose Flie:
Thêm điểm 300. Ở cửa sổ FD ta click vào Step trong phần Designates Step ta nhập 300 ấn Enter . Tiếp đó trong cửa sổ TP click chọn Recode .

Xóa Pose File
Ta vào cửa sổ TP click chọn FN và phím cây bút viết (hoặc ấn Shift + E trên bàn phím máy tính) rồi click chọn Cut.

Chú ý: Nếu bạn muốn xóa nhiều Pose File cùng một lúc thì ở cửa sổ FD ta click chọn FN và ấn mũi tên lên rồi click Enter
Trên đây là toàn bộ hướng dẫn tạo ,thêm , sửa, xóa Posefile trong lập trình robot Nachi.
Để xem hướng dẫn chi tiết hơn thì các bạn xem video Tạo chương trình Pose File – Jobchange model Bài 4 – Robot nachi level 2