Trong vận hành robot Nachi chúng ta thường thấy robot lúc thì thấy robot đi theo quỹ đạo này lúc đi theo quỹ đạo khác. Thì ở bài viết này mình sẽ chỉ ra một số kiểu đi hay còn gọi vận hành của robot nachi .
Bài viết này mình xin đưa ra 5 kiểu nội suy trong robot nachi :
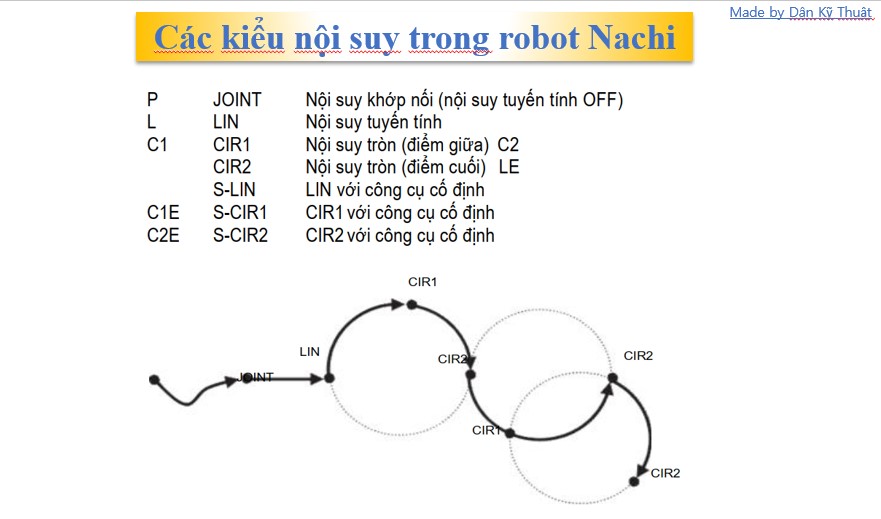
- P JOINT Nội suy khớp nối ( nội suy tuyến tính OFF )
- L LIN Nội suy tuyến tính
- C1 CIR1 Nội suy tròn ( điểm giữa ) C2 CIR2 Nội suy tròn ( điểm cuối ) LE S-LIN LIN với công cụ cố định
- C1E S-CIR1 CIR1 với công cụ cố định
- C2E S-CIR2 CIR2 với công cụ cố định
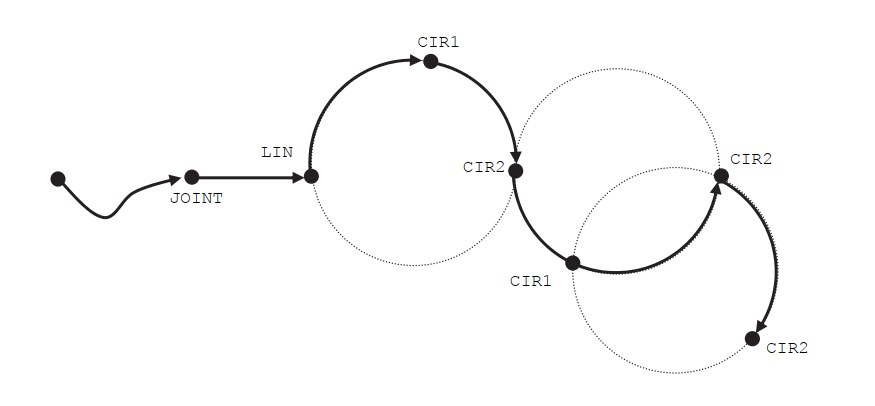
JOINT : Nội suy theo đường thẳng đi tự do của cánh tay robot, mỗi trục sẽ di chuyển mà không tính đến các trục khác, quỹ tích TCP không trở nên tuyến tính.
LIN : Nội suy theo đường thằng, mỗi trục di chuyển có tính đến các trục khác để tạo tuyến tính quỹ tích TCP
CIR1 : Nội suy theo đường tròn, bằng cách sử dụng điểm trước đó và điểm tiếp theo và một cung tròn sẽ tạo ra, TCP sẽ vẽ nửa vòng cung đầu tiên.
CIR2 : Nội suy theo đường tròn (điểm cuối), bằng các sử dụng 2 điểm trước đó sẽ vẽ cung tròn và TCP sẽ vẽ nửa vòng cung cuối cùng
>>Tham khảo: Cấu tạo của robot nachi mz07
>>>Xem thêm các kiểu nội suy trong robot nachi