Ở bài này chúng ta cùng nhau tìm hiểu cấu tạo của robot ABB IRB 120.
Giới thiệu về robot ABB IRB 120
IRB 120 là loại robot nhỏ nhất bên cạnh phiên bản thứ 4 của công nghệ robot và là loại robot nhỏ nhất được sản xuất. Rất ý tưởng cho các ứng dụng vận chuyển nguyên liệu và lắp ráp. Loại robot IRB120 đưa ra các giải pháp nhanh nhẹn, nhỏ gọn và trọng lượng nhẹ với khả năng điều khiển tối tân và độ chính xác tuyệt đối.
Thông số kỹ thuật
- Phiên bản IRB 120-3/0.6
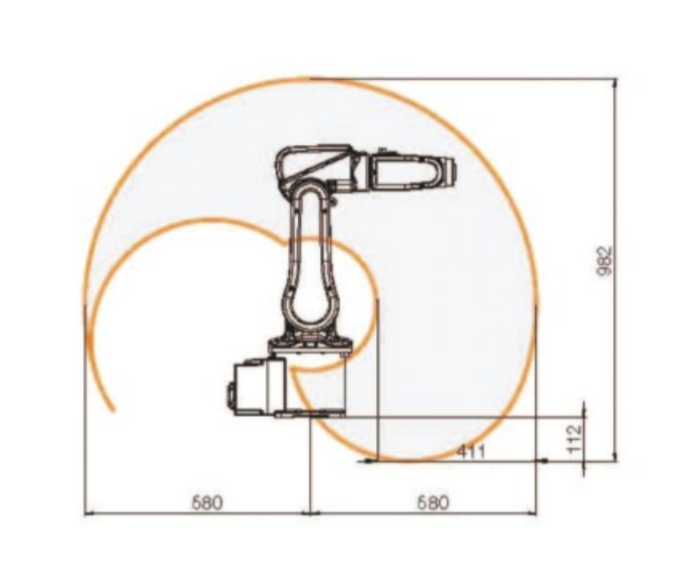
- Tầm tới 580mm
- Khả năng tải 3kg
- Khả năng tải của tay 0,3kg
Đặc tính
- Cung cấp tín hiệu tích hợp : 10 tín hiệu trên cổ tay
- Cung cấp nguồn khí tích hợp: 4 day khí trên cổ tay (5bar).
- Khả năng lặp lại vị trí 0,01mm.
- Lắp đặt robot: ở bất cứ góc nào.
- Mức độ bảo vệ: IP30.
- Bộ điều khiển : IRC 5 Compact/ Tủ IRC 5 đơn hoặc lắp Panel.
Cấu tạo của robot ABB IRB 120
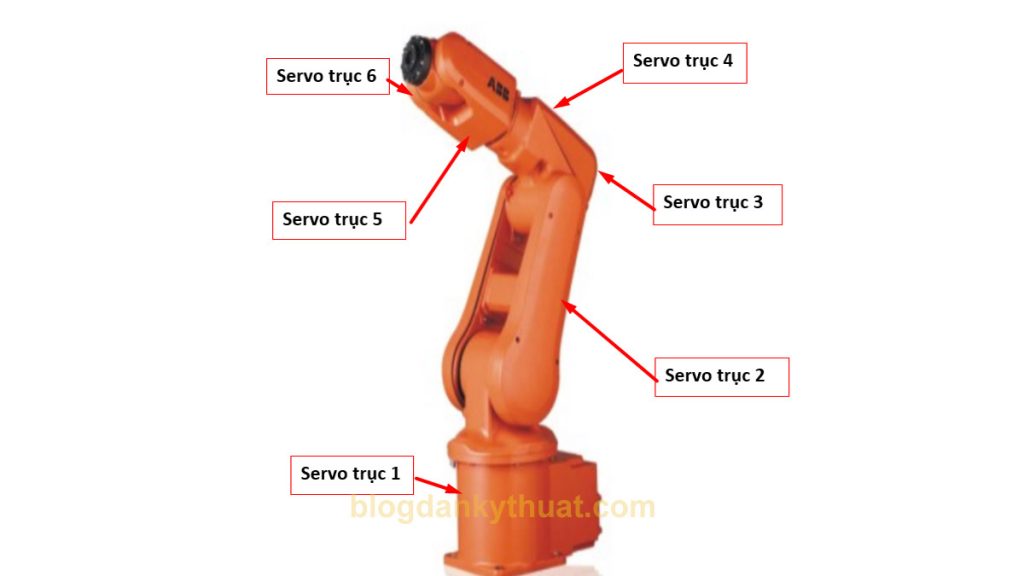
1. Động cơ của robot
Loại robot 6 trục có khả năng tải lên tới 3kg (4 kg khi cổ tay cúi xuống) và tầm với 580mm, rôbốt này có thể thực hiện nhiều hoạt động khác nhau linh hoạt hơn các giải pháp tự động hoá cố định. IRB120 là hệ thống được xây dựng hoàn hảo để thiết kế cho các ứng dụng tiết kiệm chi phí – đặc biệt không gian sử dụng là tối thiểu.
Robot gồm 6 động cơ để điều khiển 6 trục của robot, động cơ ở đây là AC servo được layout ở trong thân của robot :
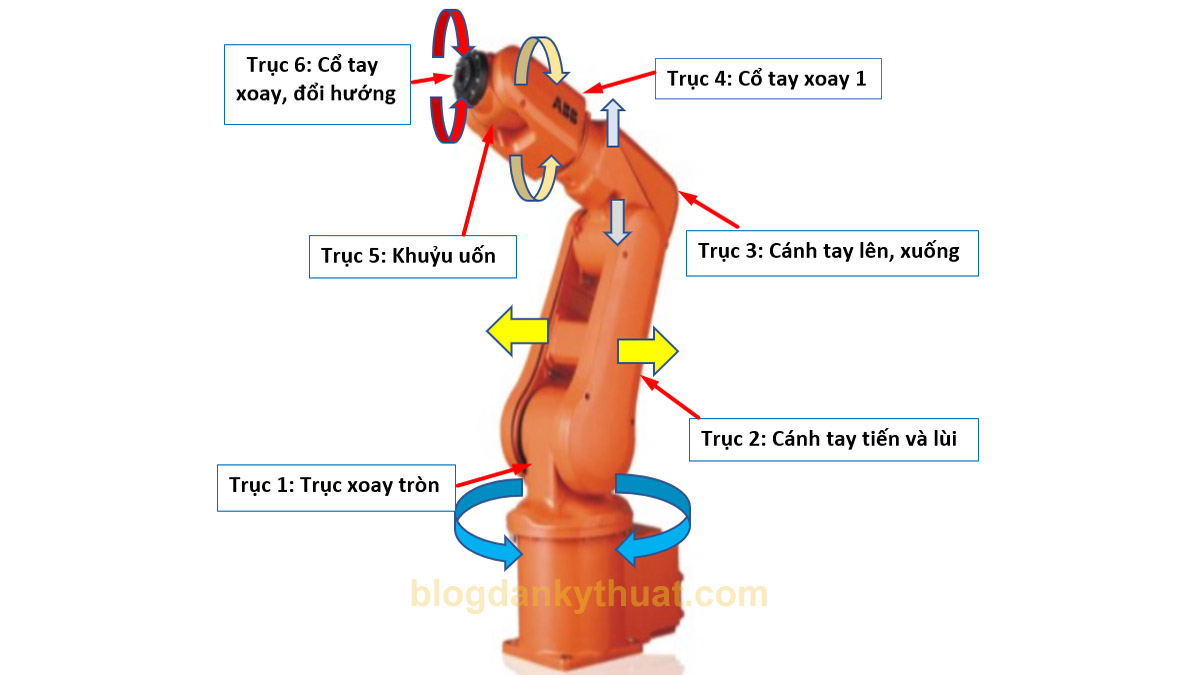
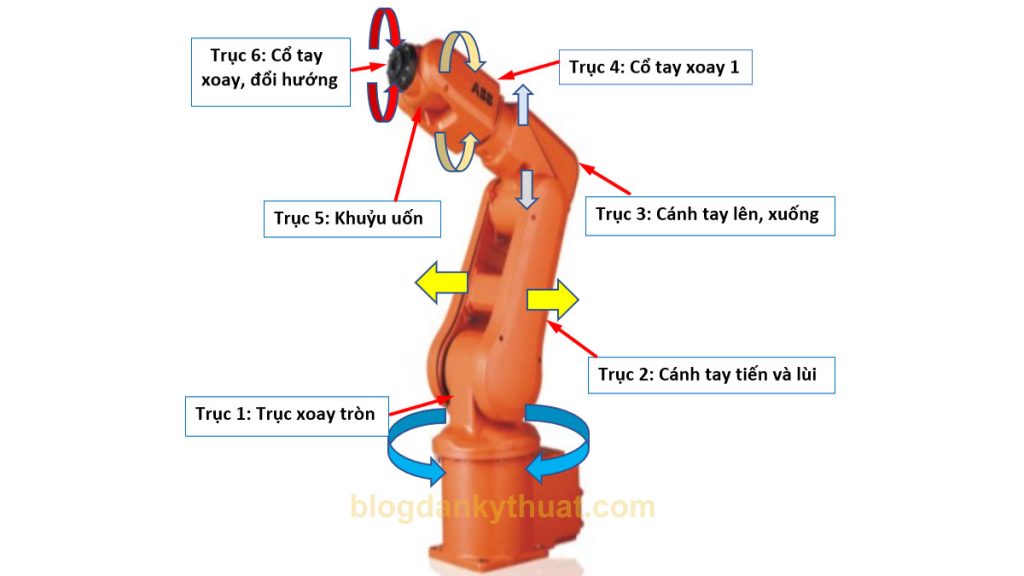
2. Cơ cấu chuyển động của robot
Gồm các cánh tay xoay , điều khiển vận hành robot xoay các hướng khác nhau tùy vào dải vận hành của từng trục.
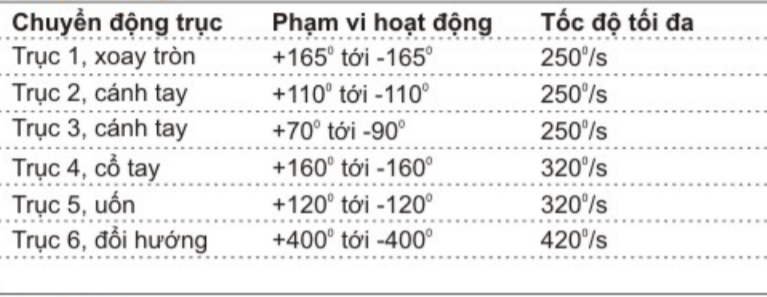
3. Dải vận hành của robot
Chuyển động
Hoạt động: Chu kỳ gắp 1kg
- 25x300x25mm : 0.58s
- Tốc độ TCP tối đa: 6,2m/s
- Khả năng gia tốc TCP tối đa: 28m/s
- Thời gian gia tốc 0-1m/s: 0,07s
Tính chất vật lý
- Kích thước đế robot: 180 x 180 mm
- Chiều cao robot: 700 mm
- Trọng lương: 25kg
Phạm vi làm việc tại trung tâm cổ tay và mô hình
>>> Xem thêm Cấu tạo của robot Nachi MZ07