Ở bài viết này chúng ta cùng nhau tìm hiểu Program và các lệnh cơ bản trong lập trình robot ABB.
Program trong robot ABB
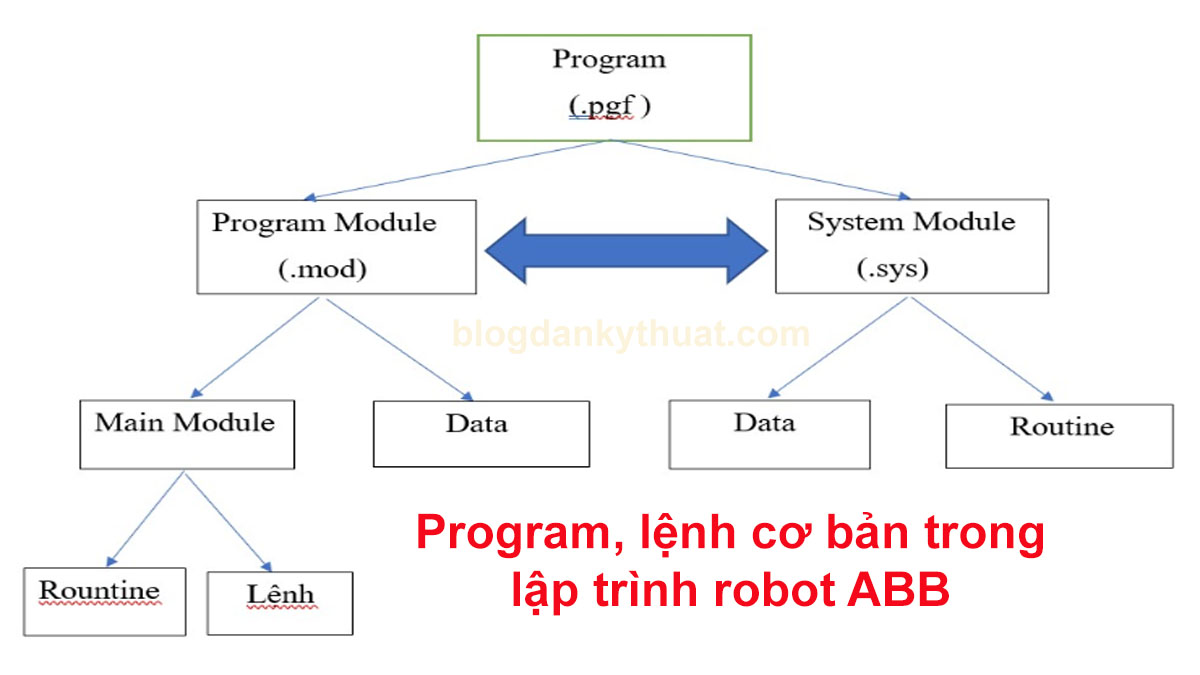
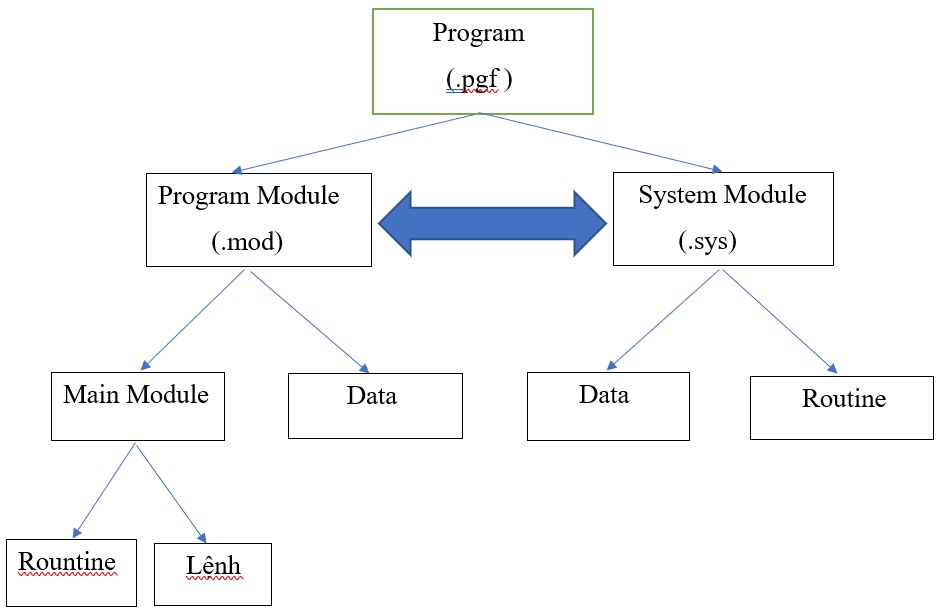
Một Program có hai loại Module là: Program Module(.mod) và System Module(.sys) xem hình dưới:
Ví dụ: EX1_MODUEL.pgf
<?xml version=”1.0″ encoding=”IOS-8859-1?”>
<Program>
<Module>MainModule.mod</Module>
<Module>Module1.mod</Module>
</Program>
Các lệnh cơ bản trong lập trình robot ABB
- MoveL: Di chuyển TCP tuyến tính đến điểm đích
- MoveC: Di chuyển TCP theo cung tròn.
- MoveAbsJ: Di chuyển robot đến một vị trí tuyết đối đã được xác định vị trí của trục.
>>> Xem thêm lệnh trong ngôn ngữ lập trình nachi, lệnh nâng cao trong lập trình robot Nachi
Cấu trúc câu lệnh
MoveL/J P10, v500, z50, tool1/Wobj:=Wobj1;
Trong đó :
- MoveL: Lệnh di chuyển
- P10: Điểm đến Data type: Robotarget
- v500: Tốc độ di chuyển. Đơn vị :mm/s. Data type: speeddata
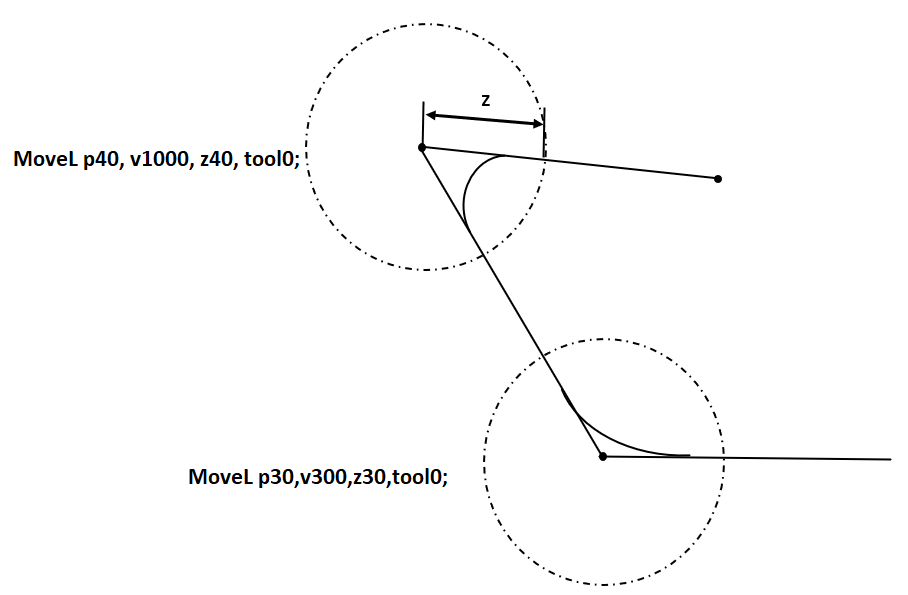
- z50: Zone Data type: zonedata
- tool1/Wobj: Tool sử dụng Data type: Tooldata
- =Wobj1: Wobj sử dụng Data type: Wobjdata
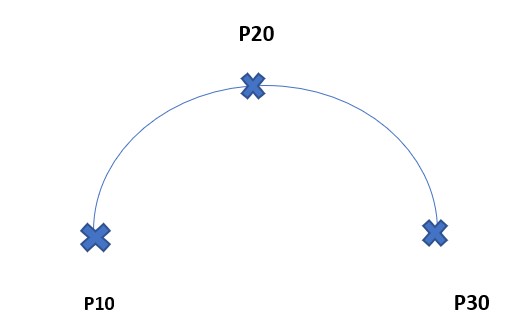
MoveC P10 P20, v500, z50, tool1/Wobj:=Wobj1;
Trong đó:
- MoveC: Lệnh di chuyển
- P10: Một điểm trên đường tròn di chuyển của TCP Data type: Robotarget
- P20: Điểm đến Data type: Robotarget
- v500: Tốc độ di chuyển. Đơn vị :mm/s. Data type: speeddata
- z50: Zone Data type: zonedata
- tool1/Wobj: Tool sử dụng Data type: Tooldata
- =Wobj1: Wobj sử dụng Data type: Wobjdata
Zone
Trên đây là toàn bộ nội dung về Program và các lệnh cơ bản trong lập trình robot ABB. Mong rằng các bạn sẽ vận dụng tốt nhé.
>>> Xem thêm video lênh nâng cao trong lập trình robot Nachi