Để lập trình ngôn ngữ robot nachi và điều khiển hoạt động của robot nachi. Thì chúng ta cần nắm được các kiến thức cơ bản của robot cũng như các lệnh điều khiển trong robot nachi.
Bài viết này blogdankythuat.com sẽ chia sẻ cho các bạn những lệnh cơ bản và nâng cao trong lập trình ngôn ngữ robot nachi .
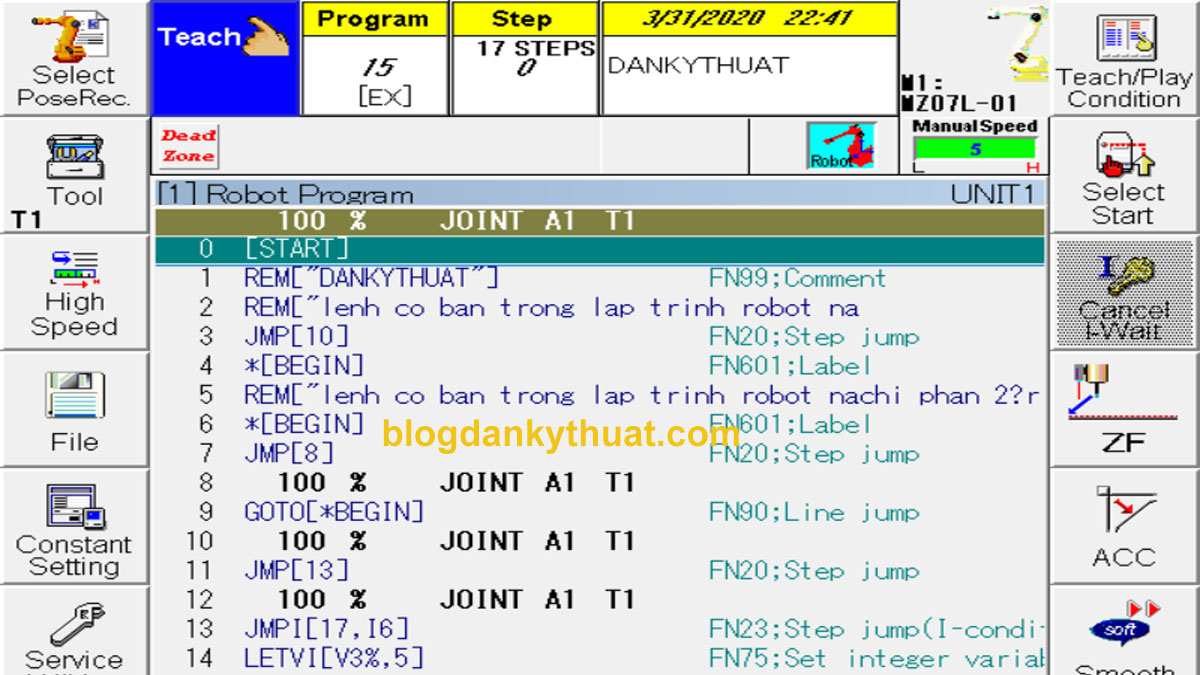
Đầu tiên trong mỗi chương trình robot chúng ta sẽ cần phải đặt tên cho chương trình robot, để có thể dễ dàng nhận dạng đó là chương trình gì :
- REM – mã lệnh FN 99: Ở đầu chương trình robot thi lệnh REM đầu tiên sẽ là tên của chương trình robot, còn các REM về sau sẽ là chú thích của từng câu lệnh ( VD : REM[“MAIN” chương trình có tên là MAIN )
- CALLP – mã lệnh FN80 : Có chức năng gọi các chương trình ( VD: CALLP[6] sẽ gọi chương trình 6 ra
- CALLPI – mã lệnh FN81 : Có chức năng gọi chương trình ra khi có tín hiệu INPUT nào đó ( VD : CALLPI[6,I5] gọi chương trình 6 ra khi có tín hiệu I5.
- DELLAY – mã lệnh FN50 : tạo độ trễ trong chương trình ( VD : DELLAY[3] trễ 3 giây sau 3 giây chương trình sẽ tiếp tục chạy các câu lệnh tiếp theo).
- SET – mã lệnh FN32 : có chức năng bật 1 tín hiệu OUTPUT nào đó ( VD : SET[O5] sẽ bật tín hiệu số O5 sáng lên)
- SETM – mã lệnh FN35 : chức năng bật or tắt tín hiệu OUTPUT ( VD : SETM[O2,0 or1] 1 có chức năng là bật, 0 có chức năng là tắt)
- WAITI – mã lệnh FN525 – chức năng là chờ tín hiệu INPUT được ON lên ( VD : WAITI[I5] chờ tín hiệu I5 được on lên)
- WAITJ – mã lệnh FN526 : chức năng chờ tín hiệu INPUT được tắt đi ( VD : WAITJ[I6] chờ tín hiệu khi nào I6 được tắt đi thì chương trình mới được thực thi các lệnh tiếp theo )
- END – mã lệnh FN92 : có chức năng kế thúc một chương trình ( chú ý trong mỗi chương trình có thể có 1 or nhiều lệnh END tuy nhiên chúng ta cần đặt nhảy qua dòng lệnh đó nếu chưa muốn kết thúc chương trình )
- LABEL – mã lệnh là FN601 : đặt tên nhãn trong chương trình robot ( VD : *[Begin] nhãn này có tên gọi là Begin )
- GOTO – mã lệnh FN90 : có chức năng gọi tên nhãn trong chương mỗi chương trình robot ( VD : GOTO[*Begin] sẽ chạy đến dòng lệnh có nhãn Begin )
- JMP – mã lệnh FN20 : cho phép nhảy dòng lệnh không điều kiện trong chương trình của robot nachi ( VD : JMP[8] nhảy đến dòng lệnh số 8 trong chương trình robot)
- JMPI – mã lệnh FN23 : chức năng nhảy có điều kiện tín hiệu Input ( VD : JMPI[10,I5] nhảy dòng lệnh số 10 khi có tín hiệu I5 )
- LETVI – mã lệnh FN75 : cho chúng ta gán giá trị nguyên cho biến số nguyên ( VD: LETVI[V5%,10] sẽ gán giá trị biến V5%=10 )
- IF – mã lệnh FN602 : lệnh điều kiện ( VD : IF I5=1 THEN 9 ELSE 15 : nếu mà I5=1 thì chương trình sẽ nhảy đến dòng lệnh số 9 ngược lại sẽ nhảy đến dòng lệnh số 15 của chương trình )
- Tổ hợp lệnh xét nhiều điều kiện :
- IF – mã lệnh FN676 ( VD : 5. IF V1%=1 6. 100% JOINT A1 T1 ( Nếu V1 = 1 thì chương trình sẽ thực thi dòng lệnh số “6”)
- ELSE IF – mã lệnh FN677 ( VD : 7. ELSE IF V1%=5 8. 100% JOINT A1 T1 ( Nếu V1 = 1 thì chương trình sẽ thực thi dòng lệnh số “8”)
- ELSE – mã lệnh FN678 ( VD : 9. ELSE 10. 100% JOINT A1 T1 ( Nếu V1 khác 1 và 2 thì chương trình sẽ thực thi câu lệnh số “10”)
- END IF – mã lệnh FN679 kết thúc xét điều kiện của vòng lặp IF
Trên đây là những lệnh cơ bản thường hay sử dụng trong lập trình ngôn ngữ robot nachi. Nếu các bạn muốn vận hành robot nachi cần nắm chắc những lệnh cơ bản trên và hãy thực hành thật nhiều lần để vận dụng đúng câu lệnh mà mình cần.
>>> Xem thêm về lập trình PLC
Ngoài ra các bạn có thể xem thêm cách thức viết một chương trình đơn giản sử dụng các lệnh cơ bản trong lập trình ngôn ngữ robot nachi tại video dưới đây :