Trong chương trình ngôn ngữ robot nachi chúng ta cần quan tâm các đại lượng hằng số và biến số trong lập trình robot nachi để cấu tạo lên một chương trình hoàn thiện mà robot có thể thực hiện được. Vậy bài viết này sẽ giới thiệu và đưa ra các định nghĩa hằng số biến số trong lập trình robot nachi để các bạn có thể hiểu rõ hơn trong ngôn ngữ lập trình robot.
1, Hằng số trong lập trình robot nachi là gì ?
Hằng số là đại lượng có giá trị thuộc một kiểu dữ liệu nhất định nhưng có giá trị không đổi trong quá trình thực hiện chương trình.
Các hằng số này không bị mất giá trị khi sảy ra lỗi về nguồn điện hay khi nguồn điện bị tắt.
– Hằng số nguyên: Dạng thập phân, dạng nhị phân, dạng thập lục phân.
– Hằng số thực
– Hằng chuỗi ký tự.
-Hằng số tư thế.
-Hằng số dịch chuyển.
2, Biến số trong lập trình robot nachi là gì?
Biến số là đại lượng có giá trị thuộc một kiểu dữ liệu nhất định và có thể thay đổi giá trị trong quá trình thực hiện chương trình.
Các cấu trúc câu lệnh có các giá trị được sử dụng khi lập trình được gọi là các biến số. Các biến số là các tham số của các phép toán và các cách sử dụng tương tự. Tên của biến số được nghịch đảo từ trước và người sử dụng không thể gán tên họ chọn cho các biến số.
>>>Xem thêm : cấu tạo của robot nachi
*Có 9 loại biến số trong lập trình robot nachi:
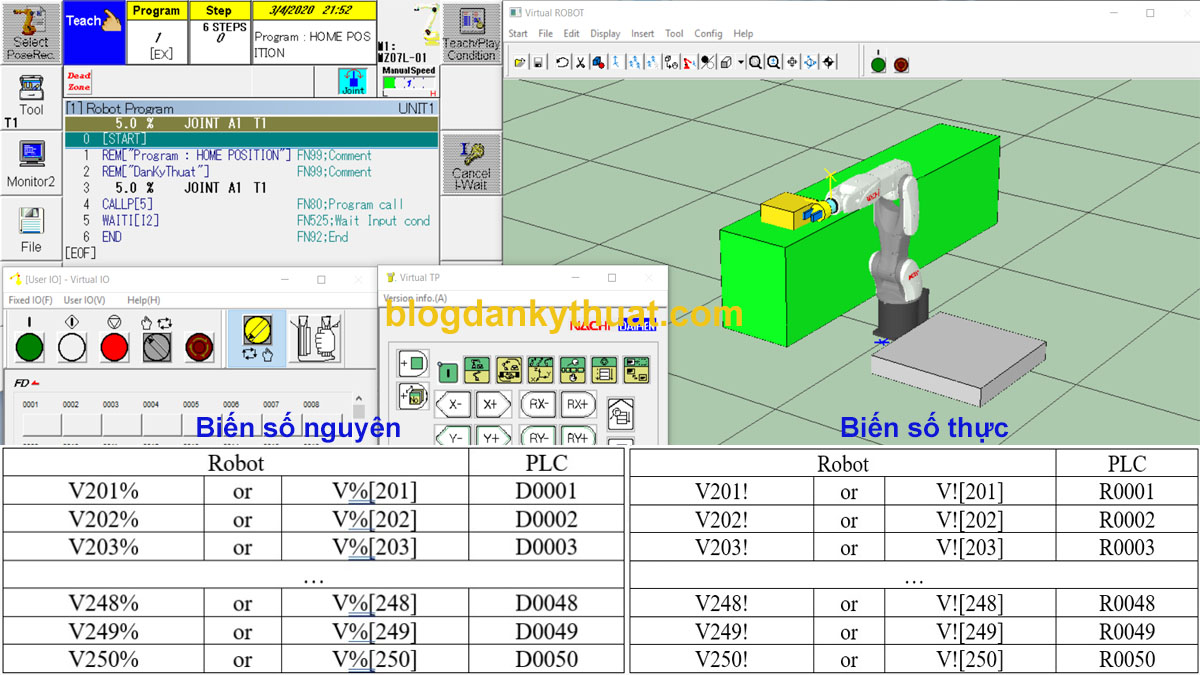
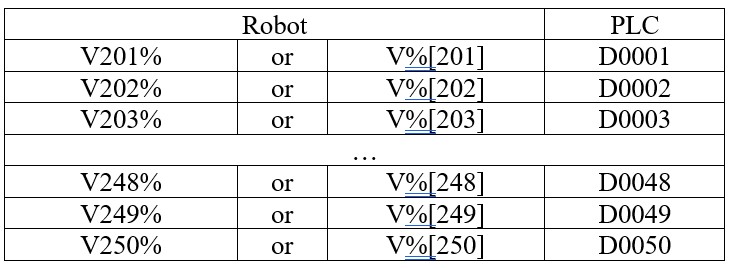
a, Biến số nguyên.
“Biến số nguyên” được sử dụng để xử lý các giá trị không có dấu thập phân.
Có 2 loại biến số nguyên là n toàn cục V% và cục bộ L%.
| Dạng thức | Vn%, V%[n] n=1 đến 250, 301 đến 500 Ln%, L%[n] n=1 đến 200, 301 đến 500 |
| Dải số | -2147483648 ~ 2147483647 |
| Ví dụ | V1%=V2%+1 L%[1]=10 CALLN10,V1%,10 JMPN10,V1%,20 |
Chú ý: các biến số nguyên chung từ 201 đến 250 là các biến số nguyên PLC cục bộ. Bảng dưới đây thể hiện mối tương quan này.
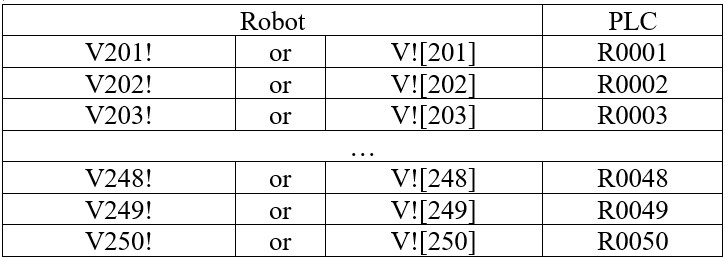
b, Biến số thực.
“Biến số thực” được dung để xử lý các giá trị có dấu thập phân.
Có 2 loại biến số thực là toàn cục V! và cục bộ L!.
| Dạng thức | Vn!, V![n] n=1 đến 250, 301 đến 500 Ln!, L![n] n=1 đến 200, 301 đến 500 |
| Dải số | -2147483648 ~ 2147483647 |
| Ví dụ | V1!=V2!+1 L![1]=10 CALLN10,V1!,10 JMPN10,V1!,20 |
Chú ý: các biến số thực toàn cục từ 201 đến 250 là các biến số nguyên của PLC cục bộ. Bảng dưới đây thể hiện mối tương quan này .
C,Biến số chuỗi ký tự.
“Biến số chuỗi ký tự” có chức năng xử lý các chuỗi ký tự. Hai chuẩn mã ASCII và Shift JIS đều được xử lý. Các mã 2-byte viết theo tiêu chuẩn Shift JIS cũng được xử lý tương tự.
Có 2 loại biến chuỗi ký tự là toàn cục V$ và cục bộ L$.
| Dạng thức | Vn$ V$[n] n=1 đến 50, (các biến số cũng được sử dụng) Ln$, L$[n] n=1 đến50, (các biến số cũng được sử dụng) V1$ &V$[1] hiển thị vùng biến số tương tự. |
| Dải số | Từ 0 đến 199 kí tự (199 bytes) |
| Ví dụ | V1$= “Excutionstate” L![1]=V1$+ “Un dersuspension” LETVS V1$, “1A” |
| Lưu trữ | Các biến cục bộ sẽ mất giá trị khi ngắt nguồn. Các biến toàn cục sẽ không bị mất giá trị khi ngắt nguồn. |
d, Biến số tín hiệu đầu vào
Đầu vào dạng bit (I)
Đầu vào dạng byte (IB)
| Pin | Group bit | |
| Tín hiệu | In,I[n] nới n=1- 2048, 5101-5196 | Ibn,IB[n] với n=1-205 |
| Dải số | 0,1 | 0 to 1023 |
| Nhóm | Input | Nhóm | Input |
| 1 | 1 to 10 | 11 | 101 to 110 |
| 2 | 11 to 20 | … | |
| 3 | 21 to 30 | 30 | 291 to 300 |
| 4 | 31 to 40 | … | |
| 5 | 41 to 50 | … | |
| 6 | 51 to 60 | 100 | 991 to 1000 |
| 7 | 61 to 70 | … | |
| 8 | 71 to 80 | … | |
| 9 | 81 to 90 | 204 | 2031 to 2040 |
| 10 | 91 to 100 | 205 | 2041 to 2048 |
e,Biến số tín hiệu đầu vào cố định
Đầu vào dạng bit (FI)
Đầu vào dạng byte (FIB)
f, Biến số tín hiệu đầu ra
Đầu ra dạng bit (O)
Đầu ra dạng byte (OB)
| Pin | Group bit | |
| Tín hiệu | On,O[n] với n=1- 2048, 5101-5196 | Obn,OB[n] với n=1-205 |
| Dải số | 0,1 | 0 to 1023 |
| Nhóm | Output | Nhóm | Output |
| 1 | 1 to 10 | 11 | 101 to 110 |
| 2 | 11 to 20 | … | |
| 3 | 21 to 30 | 30 | 291 to 300 |
| 4 | 31 to 40 | … | |
| 5 | 41 to 50 | … | |
| 6 | 51 to 60 | 100 | 991 to 1000 |
| 7 | 61 to 70 | … | |
| 8 | 71 to 80 | … | |
| 9 | 81 to 90 | 204 | 2031 to 2040 |
| 10 | 91 to 100 | 205 | 2041 to 2048 |
g, Biến số tín hiệu đầu ra cố định
Đầu ra dạng bit (FO)
Đầu ra dạng byte (FOB)
h, Biến số tư thế
“Các biến số tư thế ” thể hiện tư thế của robot. Thông thường để sử dụng các biến số tư thế cần phải tải tệp tư thế về trước khi sử dụng. Nhưng cũng có thể tạo ra các biến tư thế trong lập trình ngôn ngữ robot như cách sử dụng định dạng (X,Y,Z, roll, pitch, yaw).
| Định dạng | Pn,P[n] n=1 to 999 (các biến số có thể được sử dụng) |
| Ví dụ | P1=(100,0,100,0,0,90) |
Ví dụ:
USE 1
P1 = (1800,0,2000,0,-90,-180)
MOVEX A=1,M1X,P,P1,R=10.0,H=1,MS
END
i, Biến số dịch chuyển
“Các biến số dịch chuyển” cho các giá trị dịch chuyển .Đây còn gọi là bộ ghi dịch chuyển. Biến số này sử dụng lệnh MOVEX-X (X,Y,Z,roll, pitch, yaw). Các trục bổ sung không được hỗ trợ.
| Định dạng | Rn,R[n] n=1 to 9 |
| Ví dụ | R1=(10,1,0,0,0,0) |