Hệ tọa độ Tool trong robot ABB là gì? Các bước xác định TCP như thế nào?
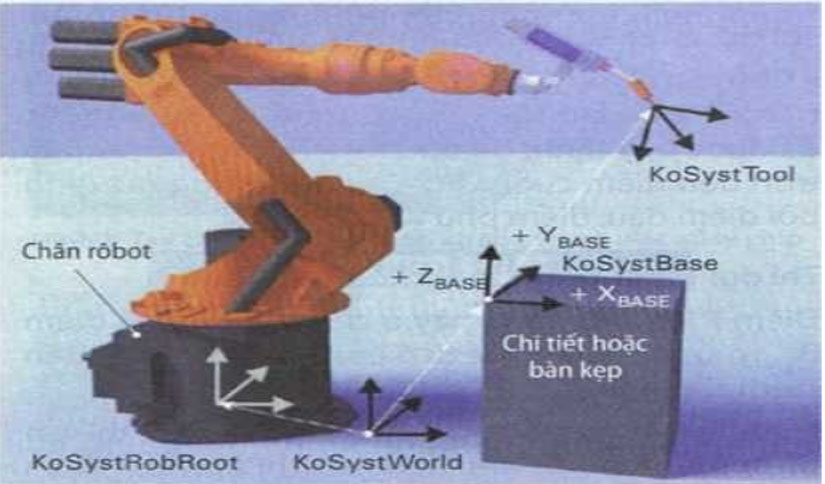
Hệ tọa độ Tool là hệ trục tọa độ vuông góc, nằm tại điểm hoạt động TCP (Tool Center Point) của dụng cụ. Nó dựa vào hệ trục tọa độ BASE.
Hệ tọa độ của Tool giúp cho robot :
- Xác định TCP và định hướng Tool
- Cần thiết để có thể chạy robot (TCP) theo đường thẳng
- Có thể thay đổi tooldata, khi Tool bị hỏng
- Tạo khả năng thay đổi Tool mà không cần thay đổi chương trình
- Giúp tool ở vị trí phù hợp với chuyển động nhất có thể
TCP (Tool Centre Point)
- TCP là điểm trung tâm của Tool.
- Tùy vào loại tool mà chọn các điểm TCP khác nhau.
- Khi không lắp Tool thì mặc định Robot đang sử dụng điểm tool 10 điểm TCP nằm ở giữa trục 6.
Tooldata
- TCP value: Tọa độ vị trí của TCP.
- Mass: Trọng lượng của Tool.
- COG (Center Of Gravity) : Trọng tâm của tool.
- Momen quán tính : ix,iy,iz….
Cách xác định TCP
Các phương pháp xác định TCP:
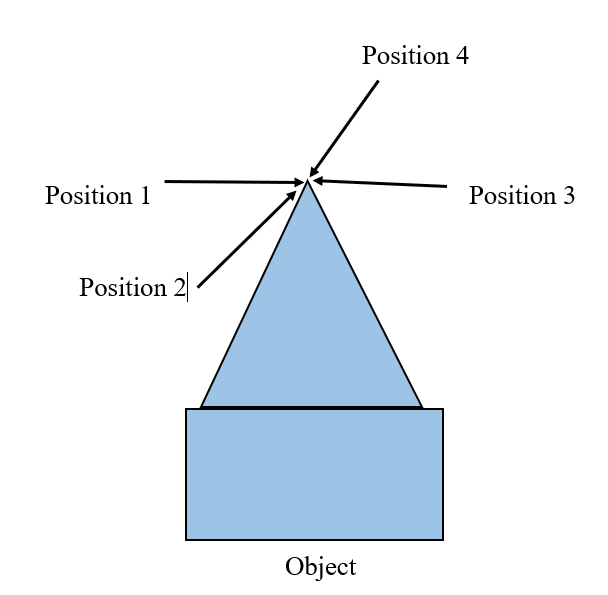
- Phương pháp 4 điểm : Dịch chuyển robot đến 1 điểm cố định thoe các góc độ và hướng khác nhau để xác định TCP.
- TCP & Z: Thực hiện như phương pháp 4 điểm, lấy thêm 1 điểm theo hướng trục Z.
- TCP & Z,X: Thực hiện như phương pháp TCP & Z, lấy thêm 1 điểm theo hướng trục X.
>>> Xem thêm Tạo hệ tọa độ User trọng lập trình robot Nachi
Các bước xác định TCP
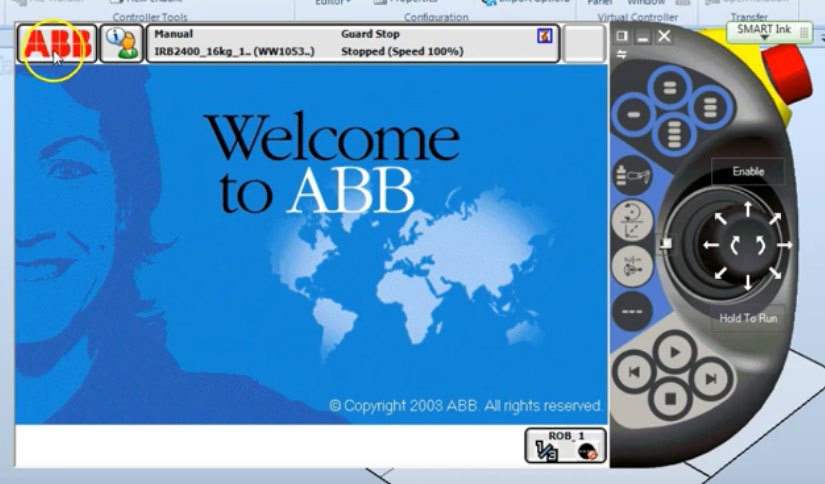
- Bước 1: Nhấn vào ABB Main Menu để mở danh mục chính.
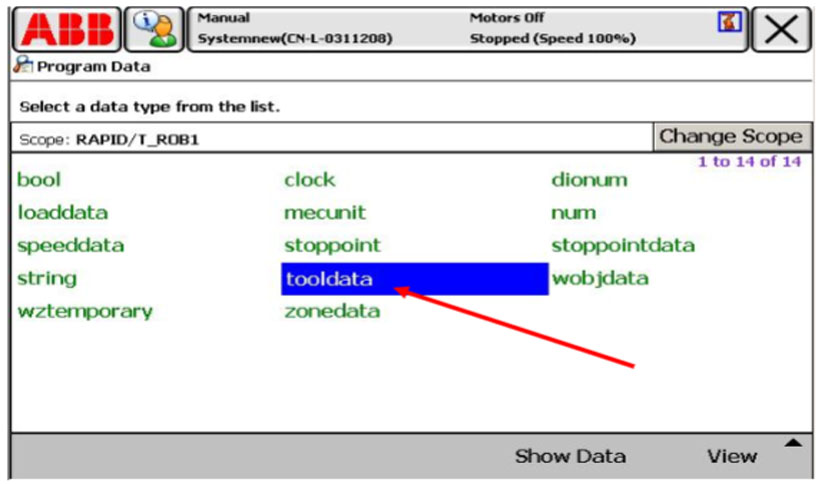
- Bước 2: Trong danh mục chính chọn Program Data.
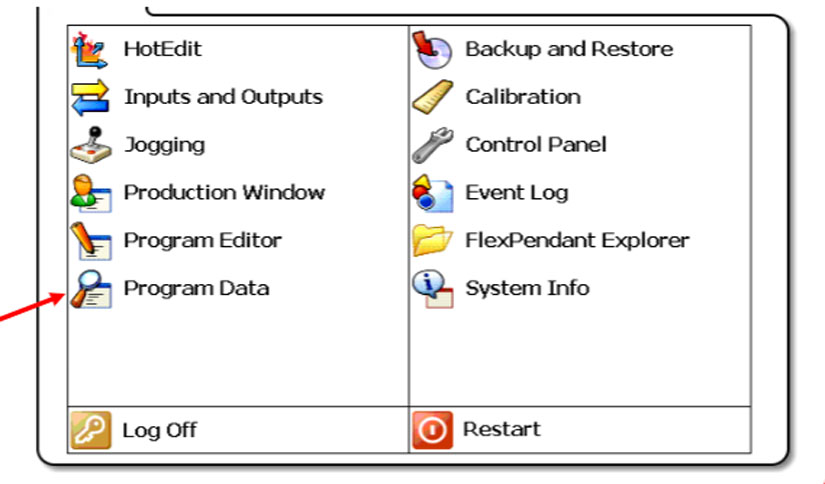
- Bước 3: Trong Program Data chọn Tooldata
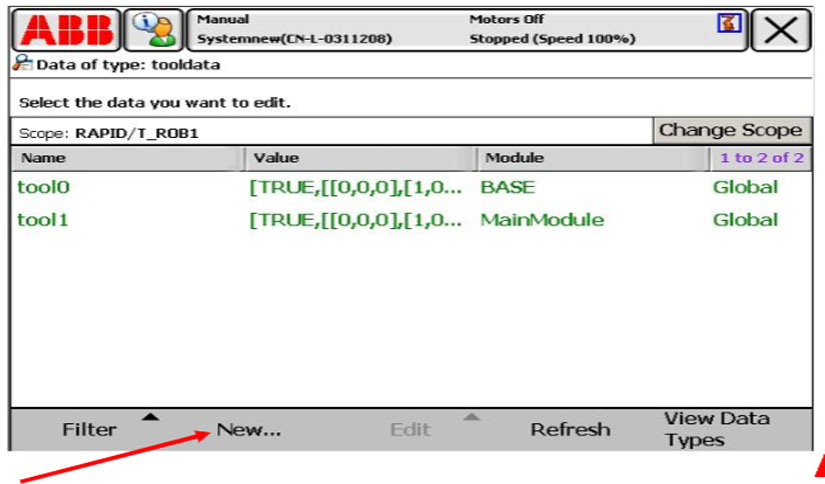
- Bước 4: Chọn new tạo tooldata mới
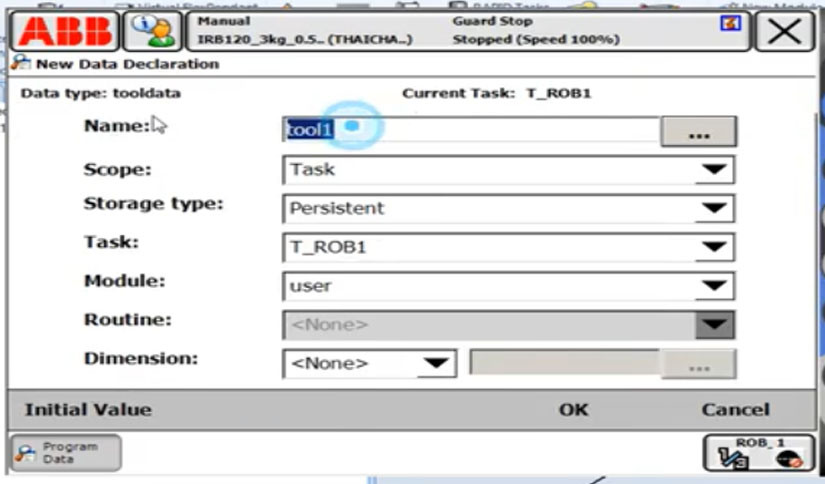
- Bước 5: Vào mục Name rồi đặt tên cho Tool -> click OK
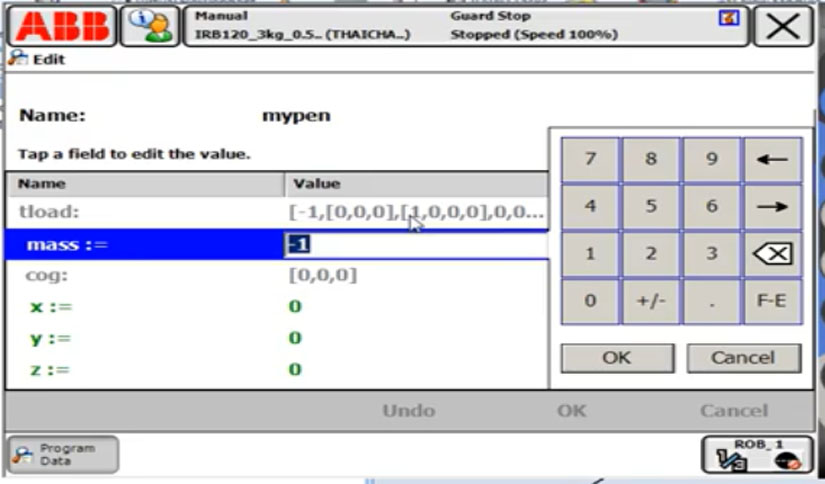
- Bước 6: Chọn Tool -> Edit -> Change Value thay đổi thông số Mass và COG
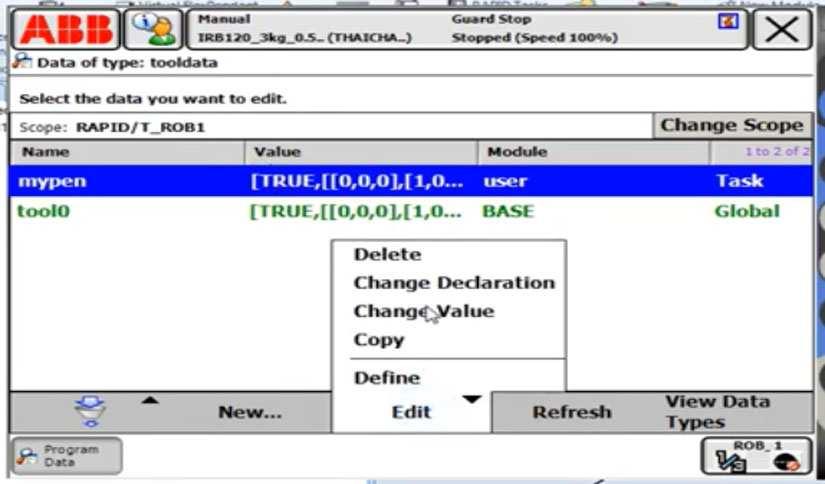
- Bước 7: Thay đổi Mass và COG
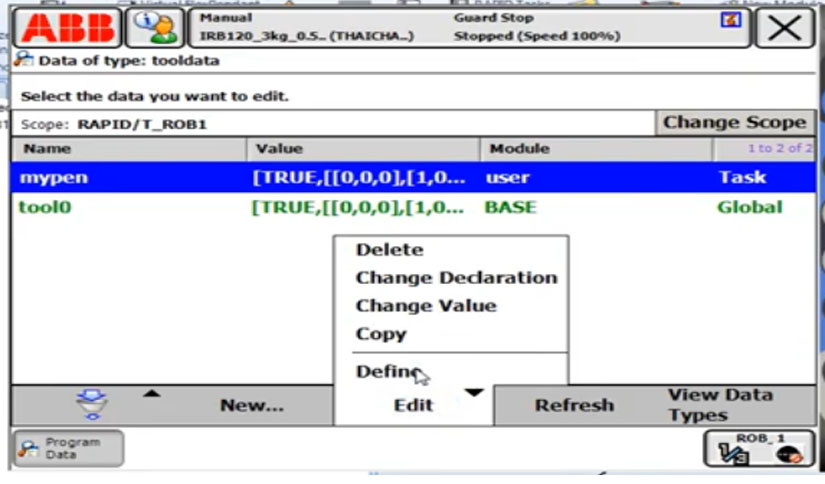
- Bước 8: Chọn Edit -> Define để bắt đầu xác định TCP
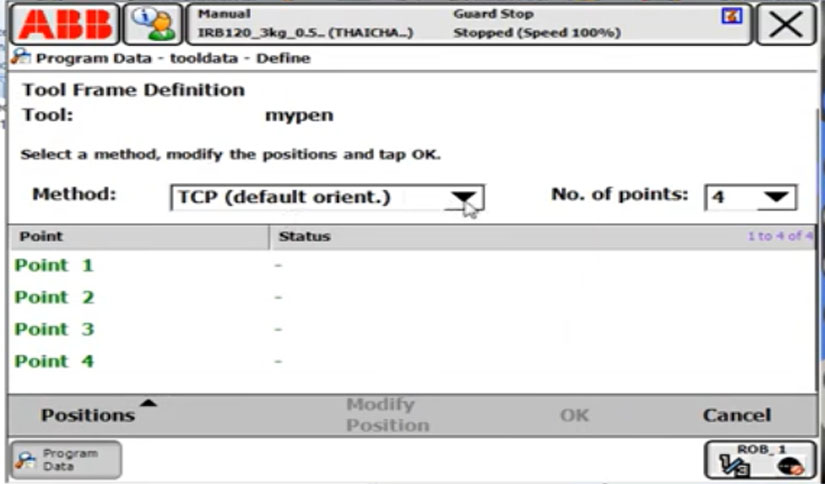
- Bước 9: Chọn phương pháp TCP (default orient).
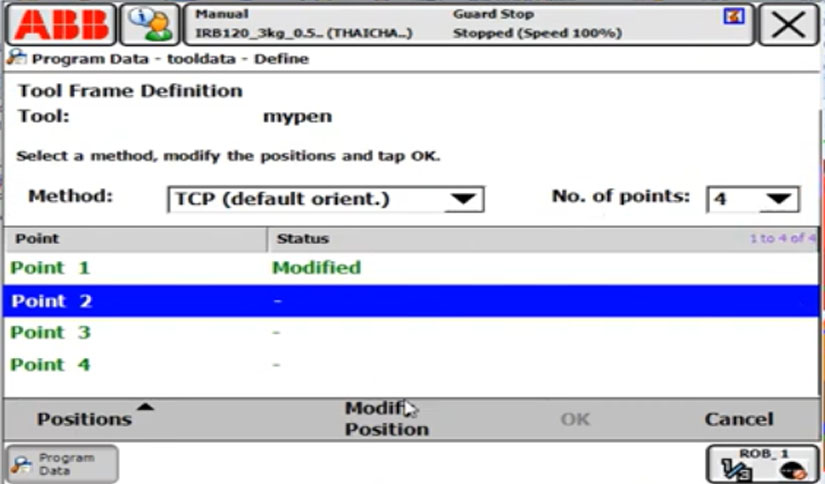
- Bước 10: Di chuyển TCP đến một điểm xác định làm chuẩn với góc độ riêng , nhấn Modify Position để xác định. Chuyển con trỏ đến điểm tiếp theo và làm tương tự đến khi xác định hết các điểm.
Trên đây là toàn bộ các kiến thức về hệ tọa độ tool trong lập trình robot ABB.
Chúc các bạn thành công!
>>> Xem thêm Lập trình PLC