Ở bài viết này blogdankythuat.com sẽ hướng dẫn các bạn tạo trạm điều khiển (Controller) cho robot ABB trên phần mềm Robot Studio để lập trình mô phỏng robot ABB.
Các bước tạo trạm điều khiển (Controller) cho robot ABB
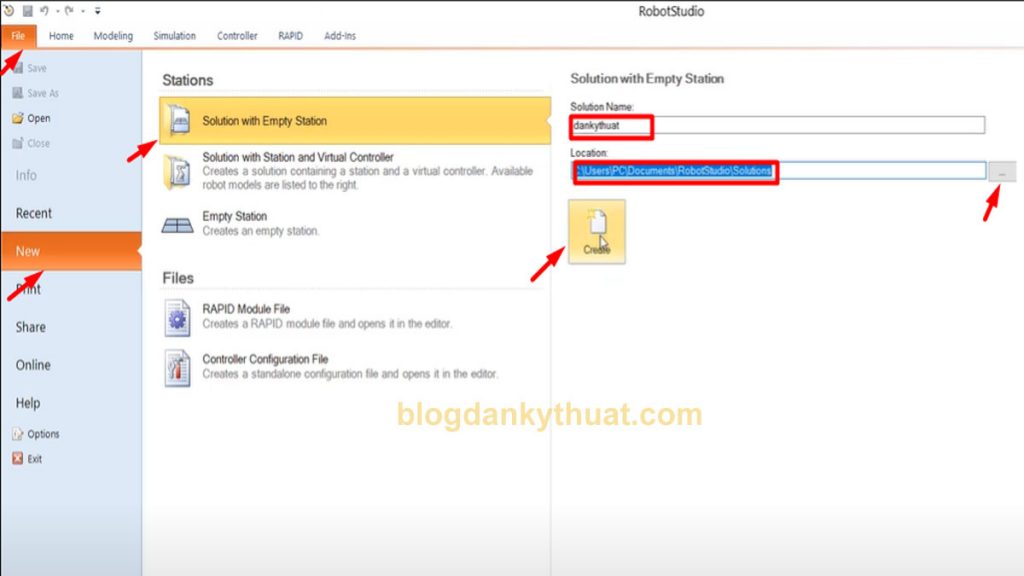
Bước 1: Bạn click vào file chọn New -> click Solution with Empty Station .
Trong phần Solution Name bạn đặt tên cho chương trình “dankythuat” -> phần Location bạn chọn bộ nhớ để lưu -> Create.
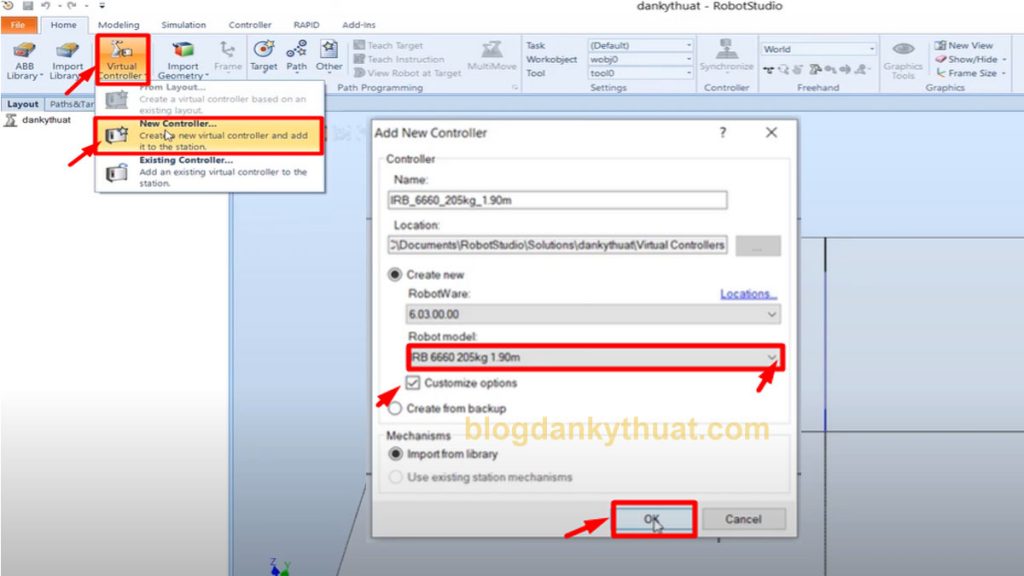
Bước 2: Bạn click Vitual Controller -> click New Controller.
Cửa sổ Add New Controller hiện lên bạn vào phần Robot model để chọn loại robot thích hợp với mục đích sử dụng của mình -> click Customize options -> click OK.
>>> Xem thêm tạo hệ tọa độ User trong lập trình robot nachi
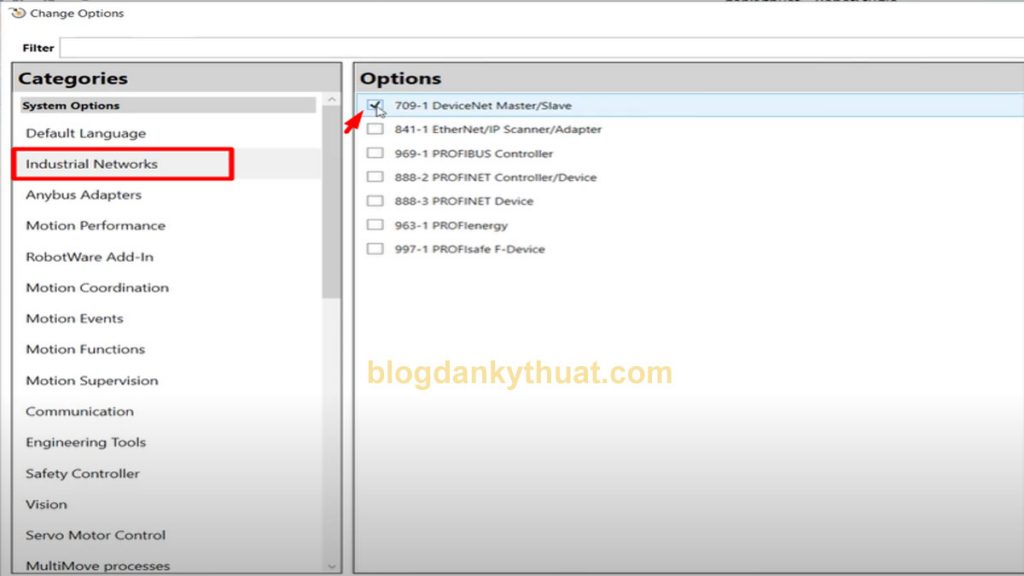
Bước 3: Cài đặt thông số cho robot
Đầu tiên bạn vào Industrial Networks -> click chọn 709-1 DeviceNet Master/Stave.
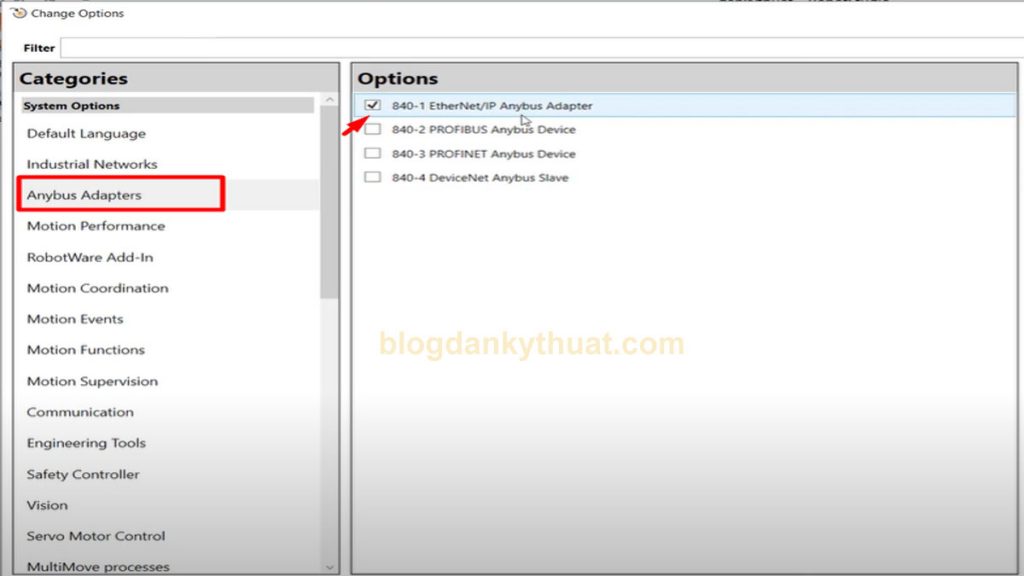
Tiếp theo bạn click Anbus Adapters -> click chọn 840-1 EtherNet/Ip Anybus Adapter
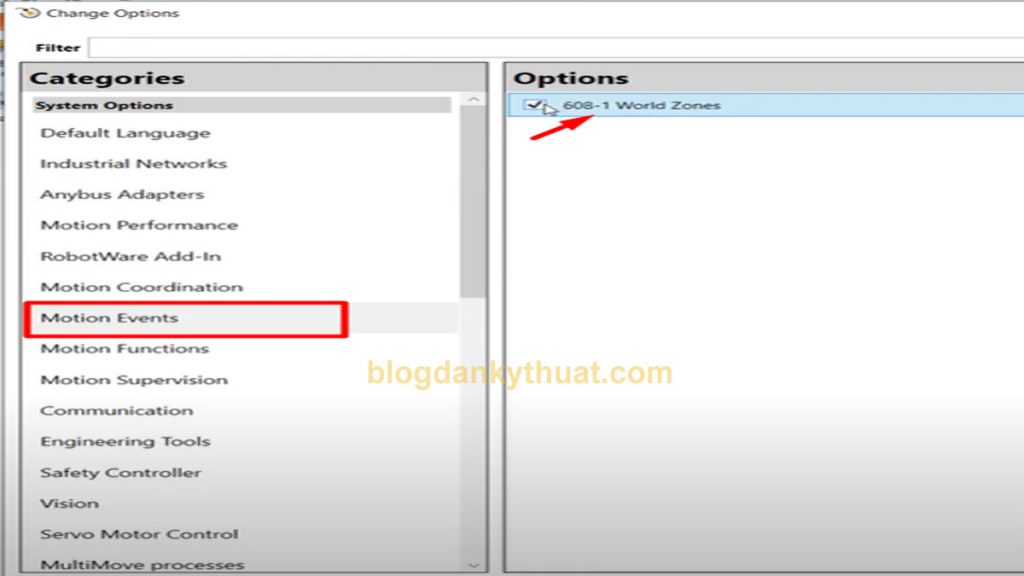
Tiếp đó bạn click Motion Events -> click chọn 608-1 World Zones.
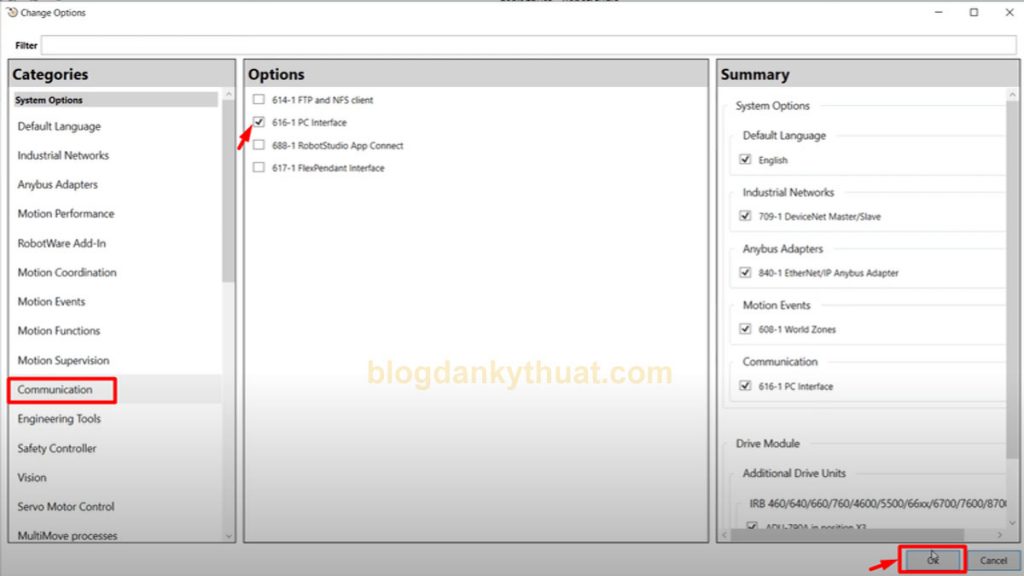
Cuối cùng bạn vào Comunication -> click chọn 616-1 PC Interface. Rồi Click OK
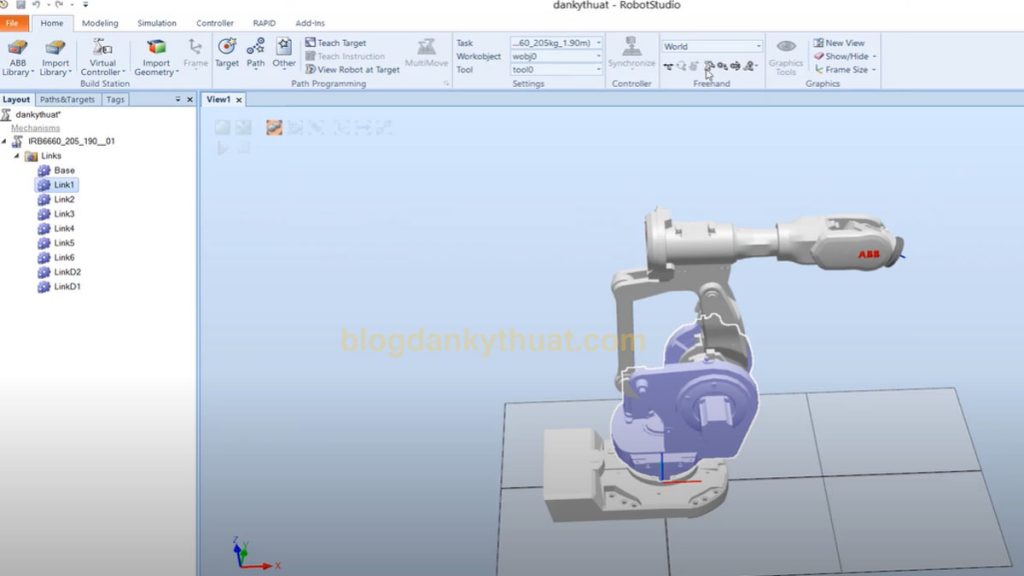
Bước 4: Robot đã được tạo ra.
Trên đây là toàn bộ các bước tạo controller cho robot ABB. Rất đơn giản đúng không nào?
Chúc các bạn thành công!
Để hiểu rõ hơn các bạn xem video hướng dẫn chi tiết Create Station Controller cho robot ABB